


自動運転に必要な技術の大部分は、すでにTRW が提供している技術を拡張したものがほとんどです。安全性の向上を目的としたDAS センサーの搭載により、車両周辺の状況認識が向上し、ブレーキ、ハンドルのルーチン操作が可能となります。つまり、TRW のアクティブセーフティ( 予防安全)とパッシブセーフティ(乗員安全)システムが、日常的な運転状況にまで広がってきています。
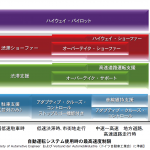
TRW は、自動運転へのロードマップをいくつかの自動化レベルに分けて次の図1に示すように定義しています。TRW は、自動運転実現における最も大きな課題を、部分的自動運転システム(レベル2)から条件付き自動運転システム(レベル3)への移行にあると考えています。
レベル2 システムではドライバーは車両の動きと周囲の道路状況を常に確認しなければなりませんが、レベル3 システムになると、ドライバーは少なくとも数秒の間、運転操作をしなくともよく、再度コントロールを取り戻すまでの間は、車両は自動で運転を継続することが可能となると予想しています。
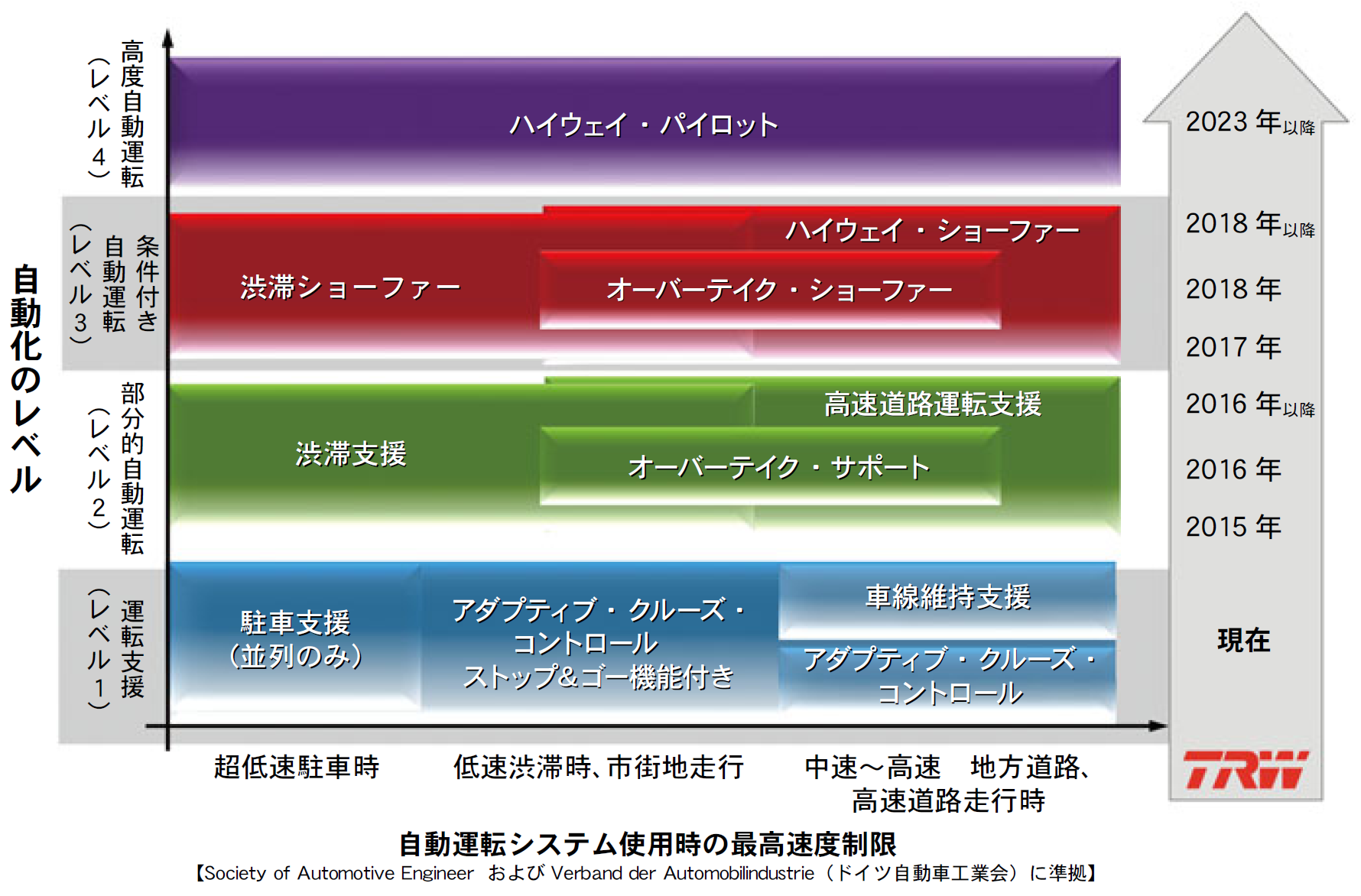
(図1・自動運転に向けたTRW のロードマップ)
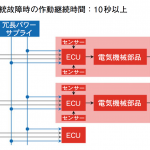
このレベルの自動運転下では、もはやドライバーは「バックアップ」システムとは見なされなくなるため、次の図2に示すように適切なコンポーネントに冗長性を持たせた車載システム構成が必要になってきます。
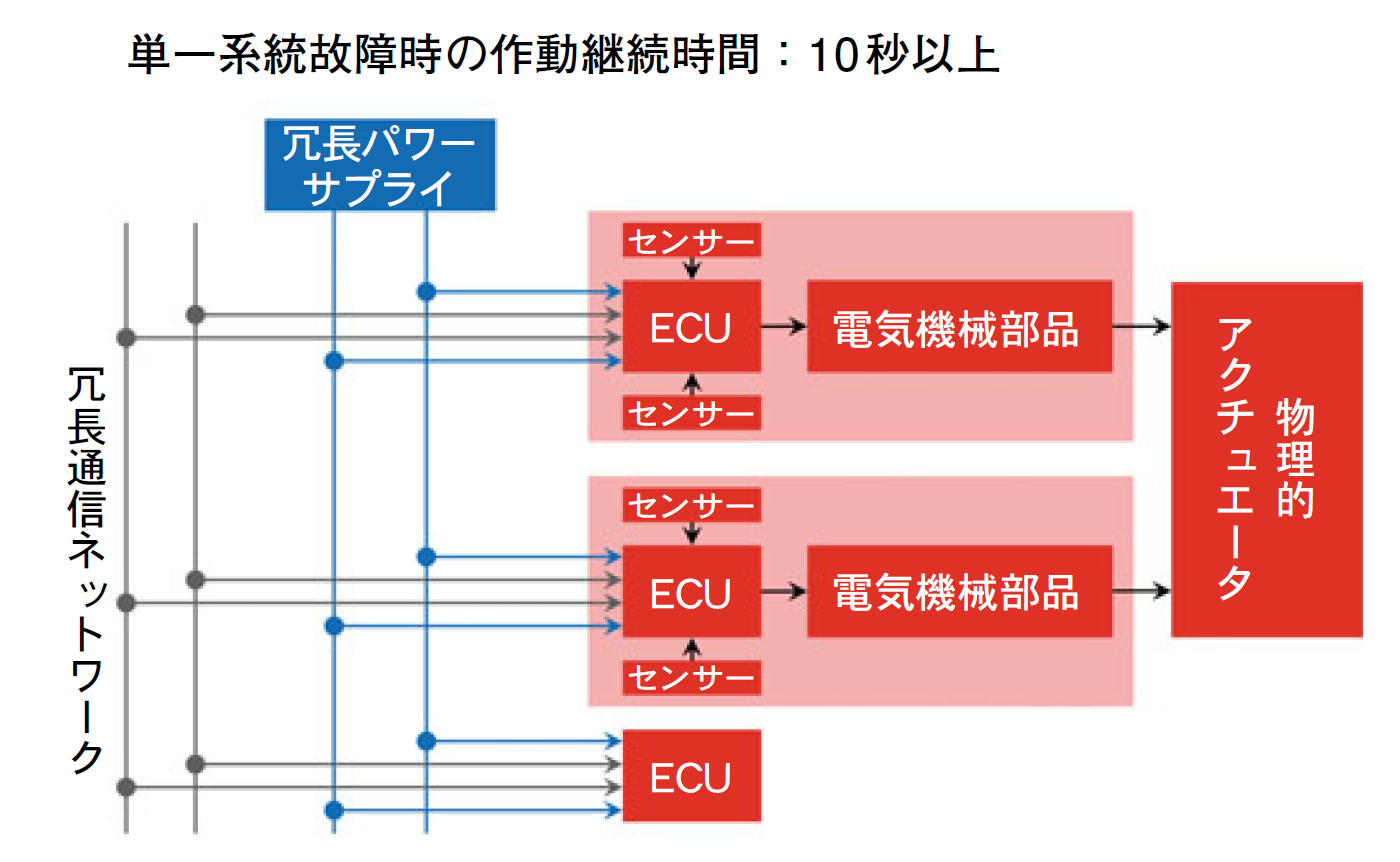
(図2・自動運転における冗長システム)
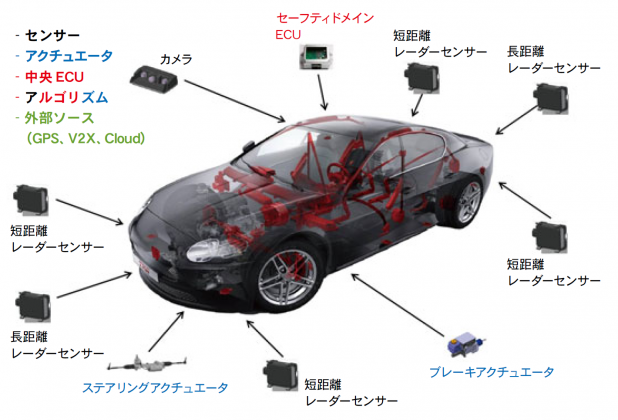
さらに自動化レベルが上がると、車線変更や高速道路への出入り、交差点での通行の自動化など、より高度な機能を実現するために、車両の360 度全方位の環境の検知が不可欠になってきます。 現在、TRW では、高速道路や主要道路における自動運転(レベル2 およびレベル3)に関する技術開発に注力しています。







