

目次
■滑りやすい路面や急加速時にグリップ力低下による後輪タイヤの空転を防止
■前後輪の回転差から空転を検出すると瞬時にエンジン出力を制御
TCS(トラクションコントロールシステム)は、滑りやすい路面や大きな駆動力によって発生する後輪タイヤの空転をエンジン出力の制御によって抑えて、発進時や加速時、旋回時の安定性を向上させるシステムです。
後輪(駆動輪)タイヤの空転を防止するTCSの構成と効果について、解説していきます。
●TCSの必要性
トラクションとは、タイヤが路面に対して発生する駆動力を指し、TCSはこの駆動力を最適化する制御システムです。より高い安全性が求められる上級クラスのスポーツバイクなどを中心に採用されています。
滑りやすい路面や急加速時に、路面との摩擦を上回るトルクによって後輪タイヤがグリップ力を失うと、空転(ホイールスピン)が発生して車体姿勢が不安定になり、最悪の場合は転倒に至ります。空転が発生すると同時に、エンジントルクを抑えて走行を安定させるのがTCSシステムの役割です。
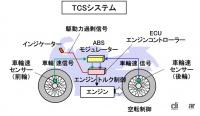
●TCSの構成
TCS制御では、まず駆動輪である後輪タイヤの空転状況を検出する必要があります。
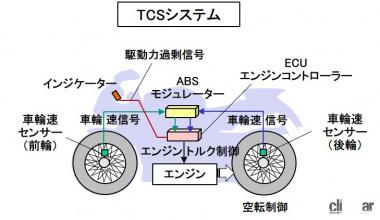
初期のTCSでは、リアタイヤの空転によって発生する急激なエンジンの回転上昇率を検出してリアタイヤの空転を判定していました。その後、ABS制御で前輪と後輪の車輪速センサーを比較する手法が一般的になったこともあり、TCSも前後輪の回転差から後輪タイヤの空転状況を判定するようになりました。後輪タイヤの回転数が前輪タイヤの回転数を上回って規定値を超えると、TCSコントロールユニットは空転が発生したと判定するのです。
空転判定を受けたECU(エンジンコントロールユニット)は、エンジンの点火時期や燃料噴射量、スロットル開度の調整でエンジントルクを瞬時に抑えます。エンジントルク制御によって前後輪の回転差が解消され空転が収まると、通常のエンジン制御に復帰します。さらにより制御精度を上げるために、制動力の制御と組み合わせるシステムもあります。
●IMUを使った高精度TCS
TCSは、後輪タイヤのスリップを抑える一般的なシステムから、現在では走行状況に応じてより精度高く制御するシステムへと進化しています。この進化の過程で重要な役割を果たしているのが、走行中のバイクの姿勢を正確に把握する「IMU(慣性計測装置)」です。
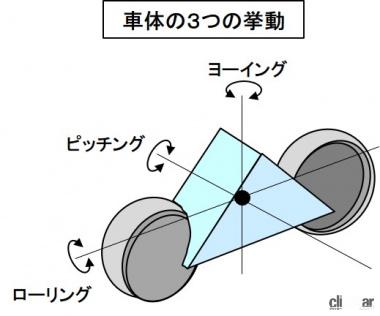
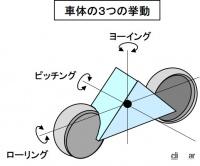
バイクの動きには、左右方向の軸を中心に回転する「ピッチ」、前後方向の軸を中心に回転する「ロール」、上下方向の軸を中心に回転する「ヨー」があり、この3つが絡み合うように動いています。IMUは、この3方向の加速度と角速度を検出するセンサーで、車両のあらゆる動きや姿勢を瞬時に把握できるので、その情報をもとにエンジンの出力制御や車体挙動の制御ができます。例えば、バンク角や後輪の横滑りを検出し、車体の傾きに連動してより高精度なTCSやABSが実現できます。
ABSは制動時の安全制御技術、TCSは走行時の安全制御技術です。目的は異なりますが、いずれもライダーに代わって車両を安定させる技術で制御方法は類似しています。電子制御化やIMUによる車体挙動の検出などのセンシング技術の進化によって、バイクの安全性は日々向上しています。
(Mr.ソラン)


