
■2,000回/秒という高頻度で検出することが可能
自動運転技術は、まずは高速道路などの自動車専用道路で段階的に実現し、街中のように使用場所が歩行者や自転車・障害物など、非常に複雑に混在するほど技術的ハードルはより高くなります。そこに積雪などの悪天候などが条件が加わるとより難易度は高まるはず。
こうした街中での自動運転には、クルマと歩行者などの位置関係を正確に把握することがより不可欠となってきます。

そんな中、情報通信測定機器などを扱う東陽テクニカは、IMU(慣性計測装置。複数のセンサー素子から成る、加速度と角速度を検出する装置)で得られた加速度データから人間とクルマの移動軌跡を算出し、両者の位置関係を特定するための解析方法の特許を2020年4月8日に取得したことを発表しました。
同技術は、人に装着した慣性計測装置とクルマに搭載された慣性計測装置で計測された加速度データから、それぞれの移動量を計算・移動軌跡を求め、両データのタイムスタンプを同期させることで両者の位置関係を特定できるというもの。
これにより、歩行者とクルマの位置関係を約5cmの精度で、しかも2,000回/秒という高頻度で検出することが可能になるため、自動運転/ADAS(先進運転支援システム)の開発、研究への応用が期待できるとしています。
また、位置の特定をGPSなどの測位システムに頼らないため、建物や樹木などの遮蔽物が多い公道や屋内でも使用することが可能。
さらに、他の計測システムのデータを取り込んで同期することもできるそうで、たとえばドライバーの視線計測システムと同期することで、ドライバーの視線が歩行者を捉えたタイミング、その時の歩行者とクルマの位置を正確に測定することができるそう。
ほかにも、ペダル操作や操舵など、車両の挙動に関するデータと同期することも可能としています。
東陽テクニカの同技術により、新型車開発などにおける多くのシーンでの利用が期待できるとしていて、同社でも最新の計測機器と同技術とを組み合わせた新しい自動車計測技術を開発し、製品化していくとしています。
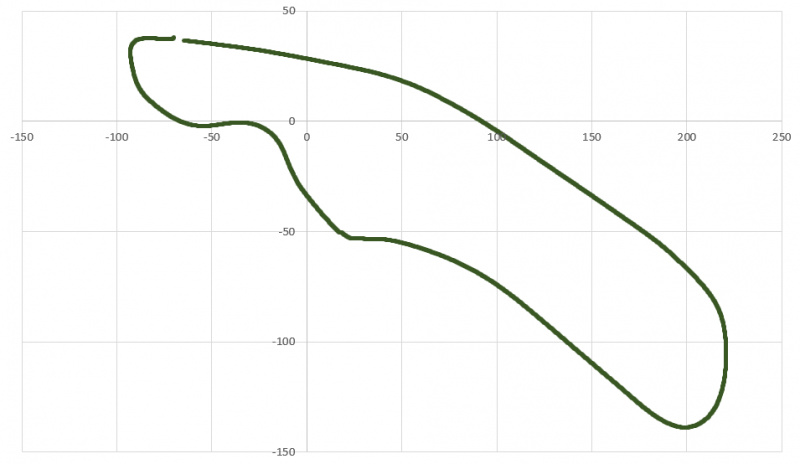
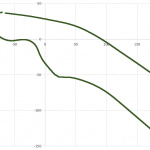
同社では、同技術を使い、IMUの計測のみで描いたクルマ移動の軌跡を公開しています。コースを周回してスタート地点に戻って来るルートで測定され、約24mの高低差がある地形でも誤差の少ない移動軌跡を描くことができるそうです。
街中を想定した自動運転では、こうしたIMUなどの多軸のセンサーが不可欠になるはず。同社では、「“はかる”技術で未来を創る」を掲げ、5Gの普及や自動運転車開発なども支える最新ソリューションを提供していくとしています。
(塚田勝弘)


