






目次
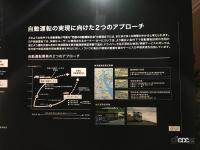
■SIP自動運転の中間報告会に潜入
最近よく耳にする「自動車の自動運転」という言葉。クルマが自分で走るということは分かりますが、実際にどんな技術を使って、どのようなカタチで私たちに便利さや楽しさを与えてくれるのかは、まだ今ひとつピンときませんよね。
実は、日本では今、国の府省庁や民間企業、大学などの研究機関が連携を取りながら、自動運転に関する技術開発や実証実験、社会実装(実用化)などを進める国家プロジェクトがあることをご存じですか?
内閣府が主導で行っている「戦略的イノベーション創造プログラム(SIP)」がそれなんですが、3月25日~26日に東京臨海副都心のTFTビルで、その活動内容などを紹介した「SIP第2期 自動運転 中間成果発表会」が開催されました。

SIPが自動運転で目指す方向性や現在までの成果、進捗などが、分かりやすくパネルなどで解説されていたのですが、このイベントには国際モータージャーナリストで、SIPの推進委員会に所属する清水和夫さんも参加。開催中のお忙しい合間をぬって、主なポイントについてレクチャーして頂きました。
現在、日本はクルマの自動運転についてどんな技術を開発しているのかや、どのように実用化されていくのかなど、ちょっと難しいけどためになる「自動運転の今」についてご紹介します。
●SIPとはどんなプロジェクトなのか?
最初にちょっと予備知識をご紹介します。SIPは、研究開発から実用化・事業化までを目指す産学官連携、府省連携のプロジェクトです。2014年に始まった第1期では、テーマ名を「SIP自動走行システム」とし、自動運転に必要な高精度3次元地図の構築と配信や、車両のサイバーセキュリティ評価手法の確立など、技術開発を中心に活動を行ったそうです(高精度3次元地図や車両のサイバーセキュリティについては後述します)。
そして、2018年からは第2期がスタート。テーマ名を「SIP自動運転(システムとサービスの拡張)」に変更し、技術開発中心から自動運転の実用化に向けたシステムの進化とサービス拡張のフェーズに移行しています。現在では、東京臨海部及び中山間地域で、様々な事業者や自治体の参加による実証実験を行うなどで、社会実装に向けた取り組みを行っています。
そんなSIPには、現在、特に重要課題と定めている4つのテーマがあるそうです。清水さんには、それらテーマについて解説をお願いしました。
●ダイナミックマップ
まずは、ダイナミックマップから。なにか地図データのようですが、どんなものなのでしょうか?

清水:「自動運転車は、精度が高い地図がないとうまく走れないのです」。
自動運転のクルマには、よくカメラやミリ波レーダー、赤外線を使ったLiDAR(ライダー)といったセンサ類が搭載されていて、それで道路や周りの建物などを認識すると聞いたことがありますが、それだけじゃだめなんですね。
清水:「自動運転車は、そういった自律系センサからの情報と、高精度3次元地図のデータを合わせることで、初めて自車の位置を正しく推定できて、安全でスムーズな走行を可能とします。
よく自車位置の把握にはGPSが必要だといわれますが、日本ではトンネルや山、坂など、GPSでは(衛星からの信号などが届かず)自動車の位置を補足できない場所も多い。そのため、国内ではGPSはあくまでサブシステムとして使うという考え方が主流です。
ちなみに、自動運転レベル3を実現したホンダの新型レジェンドや日産のプロパイロットにも高精度3次元地図が使われています」。


現在、日本の高速道路や自動車専用道路を全て網羅しているという高精度3次元地図は、道路の区画線や路肩縁、道路標識など、2次元の地図にはない詳細な情報が入った地図データのことだそうです。
作成には、カメラとレーザーセンサを搭載したクルマを実際に道路で走らせて、ベースとなる点群データを収集するため、膨大な時間や労力が必要。今後は、一般道のデータも作成が予定されています。
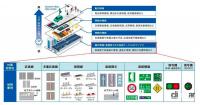
清水:「将来的には、この高精度3次元地図に、信号の情報や、例えば大雨が降った時の冠水情報など、様々な時々刻々と変化するデータを加えることが研究されています。それが、ダイナミックマップです。
高精度3次元地図という『静的情報』に、インフラからの交通規制などの情報といった『純静的情報』、交通事故の情報などの『準動的情報』、周辺車両情報などの『動的情報』をレイヤーのように重ねた高精度の地図データです。
インフラからの情報だけでなく、例えば道路にレンガが落ちているといった情報を自動車が見つけたら、後ろの自動車にもそれを伝えるといったことも考えられます。ダイナミックマップにより、自車の位置や周囲の状況を、より高精度で、切れ目なく把握できるようになるのです」。
なお、信号機からの情報を取り入れた自動運転車の実証実験については、金沢大学と中部大学、名城大学が共同で、お台場などがある東京臨海部で行っています。

レクサス RXに、カメラやミリ波レーダー、LiDARといったセンサを搭載した実証実験車両に、信号機からの情報を無線で送信。自動運転レベル4(限定領域内でシステムが全て自律走行を実施)が、よりスムーズにできるための研究などを行っているそうです。
清水:「例えば、自動運転車の前にトラックが走っていると、(目となるカメラが)信号機を見ることができない場合もあります。
また、カメラの周波数は関東では50ヘルツですが、これは人間の目でいえば1秒間に50回の瞬きをしていることと同じ。人間の目では見えている信号機の青や黄、赤といった灯火色が、カメラの映像をパソコンなどで見ると消えて見える場合もあり、自動運転車は安全な自律走行ができません。信号機からの情報は、そういった課題を解決するためなどに使われています」。
●センサシミュレータ
次は、センサシミュレータ。何かをシミュレーションすることのようですが……。

清水:「今、自動運転車にはカメラやミリ波レーダー、LiDARという、3種類の性質が異なるセンサが使われていて、それぞれの特徴を活かして自律走行を行うシステムになっています。
なぜ、3種類のセンサを使うかというと、例えば逆光や雨など、それぞれに苦手な状況や場所などがあるからです。そのため、それら3つのセンサからの情報をフュージョンすることで、より正確な情報を入手する必要がある。
そのため、それら全てが本当にちゃんと見えているかという安全性の評価も大切で、各種センサを同時にテストする必要があります。ですが、それを(テストコースや実証実験を行う道路などの)実環境で行うと、試験にかなり手間や時間、コストがかかる。そこで、シミュレーションを活用した安全性評価環境の構築を行うというのが、DIVP®(Driving Intelligence Validation Platform)コンソーシアムです」。

現在、このコンソーシアムには、8つの民間企業と2つの大学が参画し、シミュレーションに関わるツールやインターフェースなどを開発中。将来的には、自動車メーカーやサプライヤー間でセンサシミュレータを共通化することで、業界全体としてレベルアップを図り、産業競争力の向上を目指しているのだそうです。


