


国立研究開発法人海洋研究開発機構(JAMSTEC)の研究グループは、海洋鉱物資源のサンプリング調査を効率的に行うための「高効率海中作業システム」の海中試験に成功しました。
今回のJAMSTECの発表で注目されるのは、海中作業システムで使用される 遠隔操作型無人機(ROV)の開発に、日産自動車とトピー工業という自動車業界の企業が大きな貢献をしているということです。
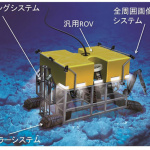
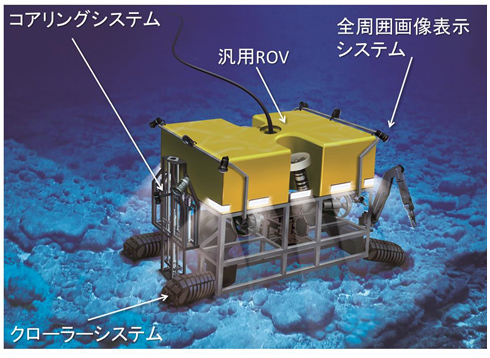
JAMSTECが開発中の高効率海中作業システムは、海中の硬質岩石のコアを採取するコアリングシステムを搭載したROVを、船上からオペレーターがROVの周囲の様子を俯瞰しながら、クローラーシステムを操作して海底で位置・姿勢を精密に制御し、目標地点の岩石コアを採取するように構成されています。

この中で、日産は全周囲画像表示システムに利用されているアラウンドビューモニター技術で、トピー工業はクローラーシステムのフリッパー型全方向移動クローラーで、ROVの開発に貢献しています。
まず、日産のアラウンドビューモニター技術はROVに搭載された複数のカメラで周囲の画像を撮影し、カメラからの画像情報を処理して、下の画像に示すような、あたかもROVを俯瞰したような画像:アラウンドビューを表示できることが特徴です。
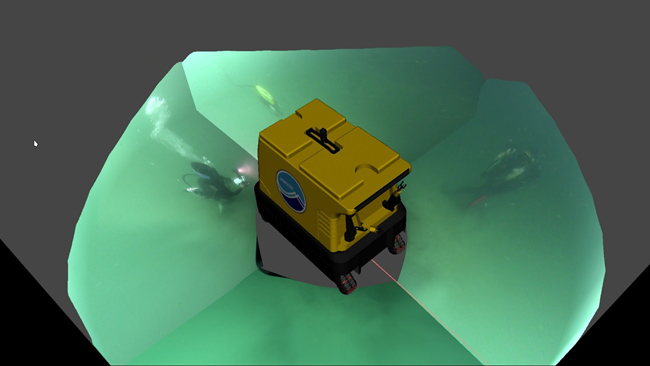
日産のアラウンドビューは、元来駐車時の周囲の様子を車両を俯瞰した状態で表示するために開発された技術ですが、今回は海底で作業するROVのモニタ・システムに応用されたことになります。ROVにアラウンドビューが導入されたのは世界初ということです。
また、自動車用ホイールのトピー工業が担当したフリッパー型全方向移動クローラーは、ROVの姿勢を変えることなく前後左右に移動しながら、姿勢角度も自由に変更できる世界初の移動機構です。
このフリッパー型全方向移動クローラーは海底でセンチメートル単位で精密にROVの位置や姿勢を調節しながらの海底鉱物のコア採取を可能にし、効率の良い海洋鉱物資源の調査を実現するために欠かせない技術です。
今回JAMSTECが実施した海中試験は、平成28年11月14日から平成28年11月27日に福岡県の関門港田野浦埠頭岸壁で実施され、海底で周囲の状況を確認しながら、精密に位置や姿勢を調節して、海底に設置された模擬岩からコアの採取に成功し、一連の技術に実用化の目処が立ったということです。
JAMSTECは今後、実海域での実証試験などを実施し、高効率海中作業システムの性能向上を図って、実際にコバルトリッチクラストなどの海洋鉱物資源を探査したいとしています。
日産・トピー工業という自動車関連企業の技術が海洋資源の探査にも活用されています。
(山内 博・画像:JAMSTEC)


