

目次
■V2V(クルマ同士)、V2I(対インフラ)、V2P(対歩行者)、V2N(対ネットワーク)の4要素で構成
●運転支援と自動運転構築のためには、V2V、V2I、V2P、V2Nの構築が不可欠
V2X(Vehicle to X)とは、クルマと何か(クルマや歩行者、インフラ、ネットワークなど)との接続や相互連携を総称するコネクテッド技術のひとつです。自動運転には不可欠の技術であり、すでにV2Xの一部は実用化されています。
コネクテッド技術や次世代モビリティ展開の中核となるV2Xについて、解説していきます。
●V2Xとは
V2Xとは、「Vehicle to X)」を意味し、クルマと何か(クルマや歩行者、インフラ、ネットワークなど)との接続や相互連携を総称する技術です。クルマのセンシング技術だけでは感知しきれないクルマや歩行者などを検知したり、ドライバーの快適性やインフォテインメントなどを向上させます。
コネクテッド技術のひとつであり、運転支援や自動運転には不可欠であり、次世代モビリティの中核となる通信技術です。
クルマとの組み合わせとしては、現在4種類があります。
・V2V(Vehicle to Vehicle)
クルマとクルマの通信
・V2I(Vehicle to Infrastructure)
クルマと道路に設置された信号機などのインフラ設備との通信
・V2P(Vehicle to People)
クルマと歩行者との通信
・V2N(Vehicle to Network)
クルマとネットワーク間の通信
V2V(クルマとクルマ)とV2I(クルマとインフラ)は一部で実用化され、技術的には進んでいますが、普及にはまだ時間がかかりそうです。
以下にそれぞれについて、解説します。
●V2V
クルマとクルマ同士の通信、「車車間通信」と呼ばれます。
死角になっているクルマが接近することを検知して衝突を避けることに使えます。次に、後続車への情報の通報(例えば、障害物の存在の通報、救急車などの緊急車両の接近など)、またレーダークルーズコントロール(先行車両の情報から適正な車間を保つ)などに活用できます。
トヨタのオプション装備「ITS Connect」には、V2Vが組み込まれています。ただし、V2V対応のクルマ同士でしか通信できないため、実際のところほとんど役に立っていないのが現状です。
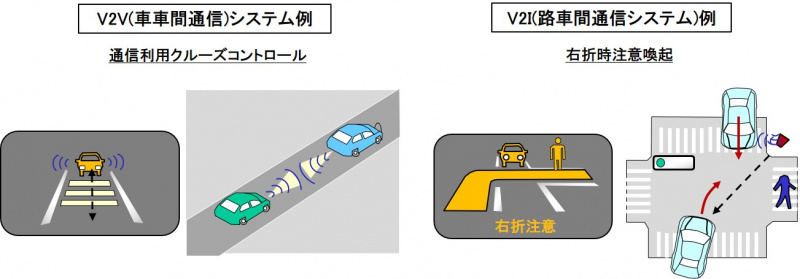
●V2I
クルマとインフラ間の通信、「路車間通信」と呼ばれます。
車載通信機と道路沿いの信号機などに設定された通信機で情報のやり取りを行います。
赤信号を無視しようとした際の警告音、信号の待ち時間を表示、右折時に対応車や歩行者を無視して発進しようとした際の警告音などに活用します。
トヨタの「ITS Connect」には、V2VとともにV2Iも組み込まれています。信号機情報の通信については、ホンダやアウディなども採用済です。ただしインフラ側の対応が必要なので、対応できるのは東京都や愛知県などの一部に限られています。
●V2P
クルマとスマホを持った歩行者との通信で、歩行者の安全を図ります。
歩行者のスマホの通信機能を使って、接近する歩行者を検知して衝突回避を図ります。GPSによる位置情報を組み合わせ、歩行者だけでなく自転車の速度や進行情報も取得できます。
クルマ側だけで対応する場合、各種センサーを使って目に見えるものは検知できますが、物陰から飛び出す人については検知できないので、V2P機能が不可欠です。
これも歩行者側が対応したスマホを携帯することが必要なので、実用化はこれからです。
●V2N
クルマとネットワーク(クラウド)の通信です。
日本では、クルマそのものをインターネット端末とする技術が普及していません。V2Nによって、クルマの制御ソフトの更新や地図情報の更新、娯楽情報、エンタメコンテンツの配信などさまざまなサービスが受けられます。
V2Xを実現するためには、すべてのクルマが対応機器を搭載する必要があります。さらに道路などインフラ側にも、信号機や各種センサー、カメラの情報を通信できる通信機器が必要です。
自動運転の実現のためには、クルマ側のセンシング技術だけでなく、V2X技術の早急な普及が必要です。
(Mr.ソラン)


