
目次
■衝突被害軽減ブレーキ(AEB)やアクティブクルーズコントロール(ACC)で活用中
●200m程度までの長距離の検知ができ、雨や霧、雪などの影響を受けづらいのが特長
予防安全の基本は、自車の周辺を監視していち早く先行車両や障害物を察知することです。検知するセンサーとしては、主としてミリ波レーダーやカメラ、レーザーレーダーなどが使われます。
AEB(自動緊急ブレーキ)やACC(アクティブ・クルーズコントロール)に採用され、先行車両を検知して車間距離を計測するミリ波レーダーの特徴や原理について、解説していきます。
●ミリ波レーダーの特徴
車両周辺を監視するセンサーとしては、ミリ波レーダーの他にもカメラ、レーザーレーダー、超音波センサーが実用化されています。
カメラでは距離計測は難しく、一般的にはカメラを2つ使ったステレオ方式にする必要があります。レーザーレーダーは直進性と分解能に優れるが、雨や霧などの悪条件に弱いです。超音波センサーは、低コストながら数m程度の計測距離しか対応できません。
ミリ波レーダーは、周波数30GHz~300GHz(波長1mm~1cm)の電波で、光に近い周波数帯を有します。直進性が強く、雨や霧、雪といった耐環境性に優れています。
一方で、形やサイズなどの詳細な識別はできず、歩行者のように電波を吸収しやすい対象物は検知できません。
●AEB、ACCへの適用
一般的な76GHzのミリ波レーダーは、前方100m~200m程度の車両や障害物を、分解能1m~2m、視野角20°程度で検知できます。したがって、AEB(自動緊急ブレーキ)やACC(アクティブ・クルーズコントロール)のための長距離検知用センサーとして使われています。
ただし、中短距離では検知精度が低下し、歩行者検知ができない課題があるため、中短距離計測ではステレオ式カメラやレーザーレーダーを併用します。
最近は、24GHzを使った中短距離用の準ミリ波レーダーも使われ始めました。
●ミリ波レーダーの構成と計測原理
レーダーの基本的な原理は、対象物に電波を放射して、その反射波を計測することによって距離や方向を検知します。
ミリ波レーダーとしては、パルスレーダー方式と連続波CW方式、周波数変調を利用したFM-CW方式があります。
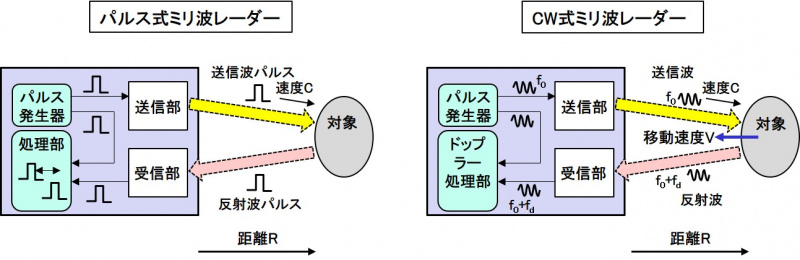
・パルス方式
送信パルス信号を計測対象に向けて放射し、計測対象から反射して返ってくる反射波パルスを受信します。
発信パルスと反射パルスの時間差ΔTを計測すれば、計測対象までの距離Rはその時間差から以下のように表されます。また速度は、送信波と反射波の周波数差から求めます。
R = C×ΔT/2 (Cは波動の伝播速度、電波や光波の電磁波では速度は約3×108m/s)
・CW(Continuous Wave)方式
連続波を送信する方式で、対象物の相対的な移動速度を計測するのに適しています。
周波数f0の送信波は、移動速度Vで移動する対象によってドップラー効果を受け、反射波ではその周波数がf0+fdと変化して受信されます。そのドップラー周波数fdを使って、相対的な移動速度は以下のように表されます。
V=C×fd/2f0
・FM(Frequency Modulation)-CW方式
FM-CW方式は、送信波を周波数変調して放射し、比較的少ない信号処理で高い分解能が得られるのが特長です。
対象物に反射して受信される信号の周波数は、距離による時間の遅れと速度差によるドップラーシフトの成分を含み、これと送信波の差分を取れば、距離と速度が求められます。
予防安全のためのセンサー技術の中で中心的な役割を果たすミリ波レーダーは、日々進化しています。
現在注目されているのは、より優れた検知能力を持つ79GHzレーダーです。現行の76GHzレーダーに比べて、高い分解能を持ち中短距離の計測ができます。さらに、歩行者や自転車などの対象物の検知も可能になるので、急速に開発が進み普及し始めました。
(Mr.ソラン)


