
目次
■ステレオ(2カメラ)方式が主流だったが、最近は画像処理の進化で単眼カメラ方式も普及
●車載カメラで撮影した映像を画像処理(数値化)して車両制御に活用
車載カメラは、バックモニターのように死角を補うビューカメラの役目だけでなく、周辺の車両や障害物を画像データとして検出して、クルマの制御や運転支援に利用されています。
運転支援や自動運転のためにレーダーなどとともに活用されている車載カメラについて、解説していきます。
●車載カメラの撮像素子
撮像素子は、レンズを通した光をデジタル信号(画像)に変換する装置で、人間で言えば網膜に相当します。一般的なデジカメには、撮像素子として「CCD」か、「CMOS」が使われています。
CCD(Charged Couples Device)は、各々のピクセル(画素)の電荷は隣接するピクセルに一斉に転送され、これを電荷-電圧変換アンプでデジタル変換して出力します。ノイズが少なく画質が良く、小型化しやすいため、小型カメラや動画などに使われています。
一方、CMOS(Complementary Metal Oxide Semiconductor)では、ピクセル内の変換アンプによってピクセルごとにデジタル変化して出力します。安価で、バッテリ消費が少ないメリットがあります。
モニターとして利用される場合は、CCDより安価なCMOSが主に使われ、画像認識には高画質のCCDが向いています。
●運転支援における車載カメラの役割
車載カメラは、当初はバックモニターなどドライバーの死角を補うビューカメラとして使われました。最近は、運転支援技術でレーダーやレーザーレーダーと同様、クルマ周辺の障害物や他車を検出するセンサーとしての役割を担うようになりました。
車載カメラの活用例としては、以下の通りです。
ただし、多くはカメラ単独でなく、レーダーやレーザーレ-ダーなどのセンシング技術と組み合わせて機能します。
・前方障害物や先行車の検出、AEB(衝突被害軽減ブレーキ)
・車線認識による車線逸脱警報LDW(レーンキープ・ウォーニング)、車線維持支援LKA(レーンキープ・アシスト)
・歩行者検知、衝突警報
・速度表示などの道路標識の認識
・居眠りやわき見運転など検知のためのドライバーモニタリング
●カメラを利用した車間距離の計測
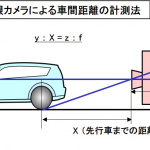
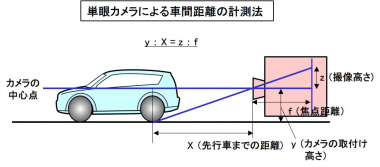
・単眼カメラ方式
1台のカメラで先行車までの距離Xは、画像座標の縦方向のピクセル位置から算出します。
x=f×y/z
f:カメラの焦点距離、y:カメラの取付け高さ、z:撮像画面上のタイヤと路面の接点からカメラの中心点までの投影高さ
単眼による距離計測は、低コストで設置場所の自由度が高いメリットがありますが、誤差が大きいという課題がありました。
しかし、日産の運転支援「プロパイロット」システムでは、モービルアイ製の高度な画像処理技術によって、単眼カメラだけで精度良くクルマ周辺の障害物や先行車を認識できています。
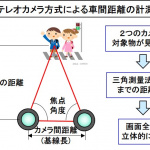
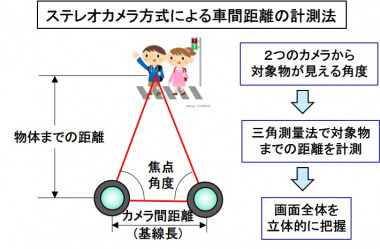
・ステレオカメラ方式
カメラを2台搭載して対象物を認識する、スバルのアイサイトが採用している手法です。ステレオカメラ方式は、人間の眼のように視差によって精度の高い距離の計測ができます。
特に奥行き情報を正確に捉え、3次元認識ができるので、歩行者や自転車、車両などのあらゆる対象物を認識でき、距離や位置を計測できるのが最大の特長です。
ステレオカメラ方式による対象物までの距離計測は、対象物を2台のカメラで撮像した撮像位置の差分(視差)を利用した「三角測量」の原理に基づいています。
車載カメラには、「映す」という機能だけでなく、現在は「測る」という機能が重要視されています。測るためには、カメラで撮影した映像を画像処理して数値に置き換える技術が必要です。
白線認識や衝突回避に加えて、対象物を3次元で捉えられる特徴を生かして道路標識の認識やドライバーのモニタリングなど今後も画像センサーの進化が期待されています。
(Mr.ソラン)


