






自律走行システムで先行する米IT大手のGoogleは2010年からトヨタ「プリウス」や、レクサス「RX450h」、アウディ「TTSクーペ」など10台以上を自動走行車に改造、2012年から約2年間で総走行距離100万kmを自律走行により走破しています。
ルーフ上にくるくると回るレーザーレーダー「LIDAR」を搭載しており、ここから周囲にレーザービームを照射して車両周辺の詳細な3Dマップを生成。
そしてそのマップを自社の高精度マップと照合しながら各種センサーからの周辺車両、歩行者、信号、障害物など様々な情報を加味、「AI」(人工知能)で情報を総合的に解析しながら自律走行する仕組みになっています。

一方、トヨタの「Highway Teammate」ではそうした技術に加えて、ドライバーの状態認識やドライバーとクルマの運転の受け渡しなどを行う 「人とクルマの協調(Interactive Intelligence)」を目指しているのが特徴。
同社が今回デモに使ったのはレクサス「GS」をベースに改造された自動走行車で、ETCゲート通過後、ドライバーによるスイッチ操作で自動運転に切り替え、自律走行を開始します。

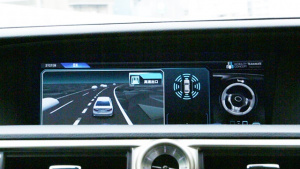
対向車や横断者、交差点が存在しない自動車専用道路の入口から目的地の出口まで自律走行が可能になっており、ジャンクションでの分流、その後の合流、出口に向けたレーンチェンジ、車線・車間維持などを実現。


