






目次
■一般道における自動運転向け高精度車両制御技術をお披露目
●自動運転の目標となるポイントをすぐ使わず蓄積しておくのがミソ
運転が上手な人の特徴の一つに、「先読み」があります。目の前の状況だけにとらわれるのではなく、常に先を予測することによって、急ハンドルなど激しい操作をすることなく、スムーズな運転が可能になります。日立オートモティブシステムズが開発中の、「一般道における自動運転向け高精度車両制御技術」のデモを見てそんなことを考えました。

7月にマイナーチェンジを果たした日産スカイラインは、運転支援技術「プロパイロット2.0」が搭載されており、「手放し運転」が可能となったことが話題となりました。しかし、それが許されるのは高速道路上だけ。今後、先進運転支援技術や自動運転の開発は進んでいくでしょうが、高速道路よりも一般道での自動運転が実現がハードルが高いのは想像に難くありません。
その理由として、一般道では狭く入り組んだ路地や歩行者・自転車など様々な移動対象が存在するため、高速道路よりも小回り走行(小R)や急なハンドル操作(高G)が必要とされるシーンが多いことが挙げられます。日立オートモティブシステムズがこのたび開発した「一般道における自動運転向け高精度車両制御技術」は、そのような場合でもクルマが行くべき位置指令に対して正確に追従することができるというものです。
この制御の特徴は二つあります。
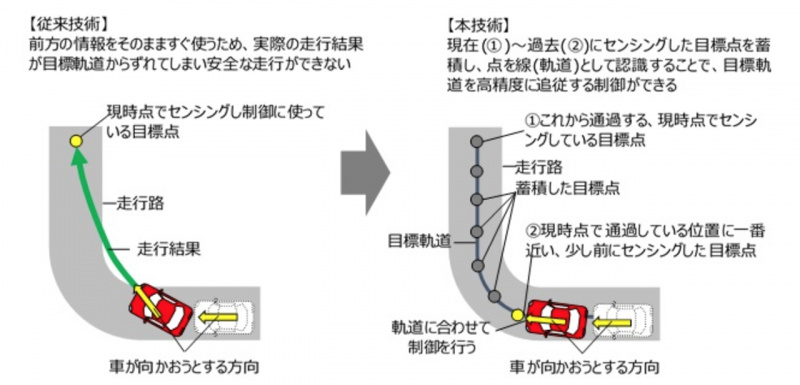
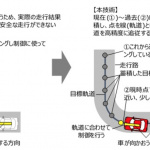
一つめは、自車が目標点を直接追わないということ。曲がりがきついカーブでは、前走車が今通っている目標点に対して制御してしまうとショートカットしてしまうことがあるのです。そこで、今指令されている目標点ではなく、ちょっと前に指令された目標点を覚えておき、それが直近に来てから軌道形状に合わせて制御することで、曲がりがきついカーブでもきちんと曲率に合わせて追従することが可能となりました。
●ECUで車両の動きを予測・補正して応答遅れを防ぐ
しかし、この制御は距離的に非常に近い目標点に対して操舵をする必要があるので、ステアリングのアクチュエーターの応答遅れが問題になります。「ステアリングを切りなさい」という指令が出てから、実際にステアリングを切って曲がるまでのタイムラグがだいたい350ミリ秒あるのです。「一般道における自動運転向け高精度車両制御技術」の二つめの特徴は、このタイムラグの問題を解決していることです。ECU内であらかじめ350ミリ秒ほど未来の車両の位置をシミュレーションし、アクチュエーターの応答遅れを予測して補正します。
北海道は帯広市にある「十勝テストコース」で行われたデモでは、タイトなS字(R6)とクランク(3.6m幅)、そして40km/hのスラロームというコースを制御のあり・なしで比較走行してみました。ちなみに今回、自車が通るべき位置指令は前走車に搭載された高精度GPSによる位置情報を活用していましたが、位置指令はなんでもよく、例えば「中央の白線」を位置指令にすることも可能だそうです。

さて、デモ走行開始です。制御がない場合は、ハンドルの切り遅れ・戻し遅れが目につきました。その遅れを取り戻そうとして、さらにハンドルを急回転するという悪循環に陥り、外側に膨らんだり内側をショートカットしてしまったりと、下手くそなドライバーが運転しているかのような動きでした。


一方、制御をオンにすると、ハンドルの切り遅れ・戻し遅れがなくなりました。余計にハンドルを回さなくて済むので、クルマの動きも滑らかです。パイロンを踏むこともなく、余裕を持って通過することができました。なるほど、これなら一般道によくある入り組んだ細い道でも問題なく走行できそうです。


この制御は、車速が速くなった際にも有効です。高速走行時にはわずか350ミリ秒の遅れでも進む距離が長いので、切り遅れの影響はより出やすくなります。また、切り遅れを取り戻そうとして急操舵してしまうと、車両の挙動が著しく乱れる危険性もあります。今回は80km/hで走行中、飛び出してきた人を回避するシチュエーションを模したデモが行われましたが、レーンチェンジして障害物を避けて、またレーンチェンジで戻って急停車するという動きを淀みなくこなしました。
●自動運転でも「クルマがきちんと動く」ことが重要
自動運転は、自動車メーカーだけでなくIT業界も積極的に取り組んでいます。「自動運転は我々の方が進んでいる」と自慢げに語るITメーカーもあります。しかし、センシングした情報を基にコンピューターが指示を出したからといって、クルマはその通りに動くのかというと、そうでもなかったりします。日立オートモティブシステムズの強みは、クルマの制御まできちんと面倒を見られるところにあります。自動運転の世界でも、餅は餅屋ということなのかもしれません。
(長野達郎)


