●「3D高精度地図データ」と360度センシングシステムが世界初の機能を実現
今秋登場のマイナーチェンジ版スカイライン(V37型)に搭載される日産自動車「プロパイロット2.0」。作動対象は、高速自動車国道法の定める高速自動車国道、道路法の定める自動車専用道路になります。
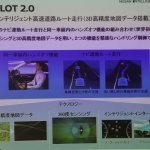
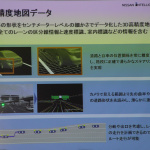
世界初の「インテリジェント高速道路ルート走行」は、3D高精度地図データ(HDマップ/360度センシング)を使うのがポイント。3D高精度地図データは車載のマップコントローラーのハード内にあり、テレマティクスを使って定期的にアップデートされます。
安全機能に関する内容を通信でアップデートする場合、日本ではリコールもしくはサービスキャンペーンになりますが、地図データの更新ですので、こうした心配(手間)はないはず。
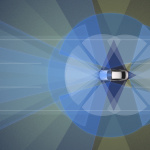
プロパイロット2.0におけるインテリジェント高速道路ルート走行は「高速道路のナビ連動ルート走行」「同一車線でのハンズオフ機能」の組み合わせが世界初であり、3D高精度地図データと360度センシングにより、この2つの機能を実現するとしています。
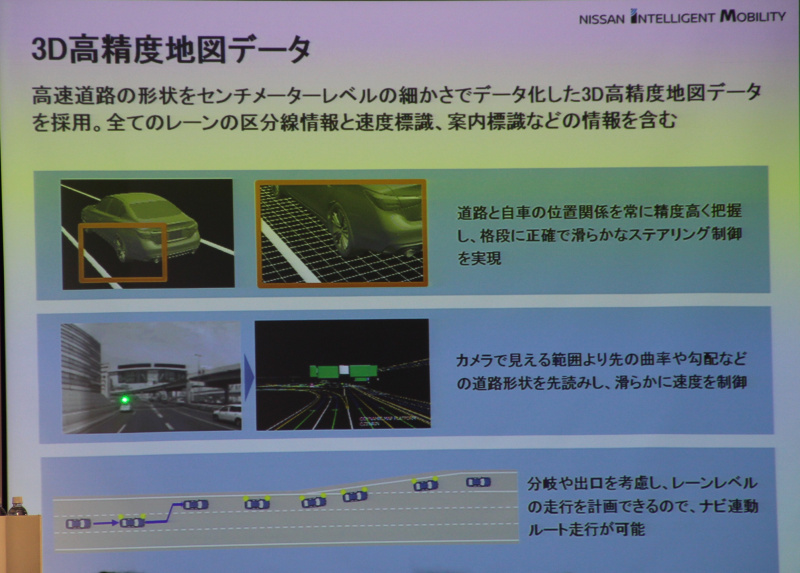
3D高精度地図データは、高速道路の形状をセンチレベルの細かさでデータ化されていて、すべてのレーンの区分線情報と速度標識、案内標識などの情報を含み、カメラで見える範囲よりも先の曲率や勾配などの道路形状を先読みし、滑らかに速度を制御できるそうです。
ナビ連動ルート走行を使うことで、目的地に向かい(自動)車線変更支援が行われる機能になります。なお、目的地をセットしない場合は決めた車線をずっと走っていくことになり、アダプティブクルーズコントロール、レーンキープ、ハンズオフの3つの機能が使えることになります。
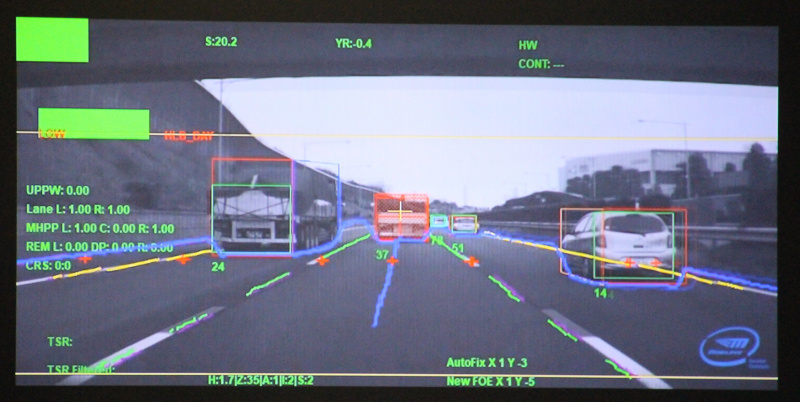
では、自車位置はどう導き出されるのでしょうか? まず、GPSで概略の場所を特定。GPSのデータで10mくらいの精度で自車位置を測位し、カメラ画像と3D高精度地図データの中にある車線の位置、ランドマークの位置などを照合しながら、横方向では5cm以内、前後方向では1m以内のポジションを確保できるそうです。なお、夜間はヘッドライトの照度で昼間と遜色のない精度を確保できるとのこと。
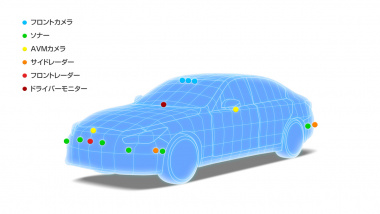
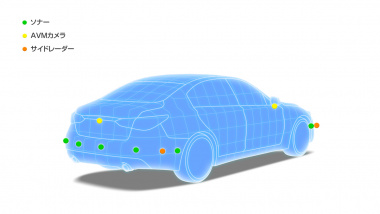
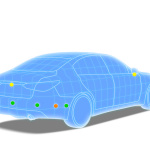
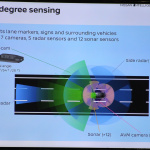
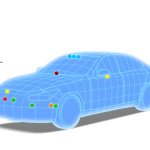
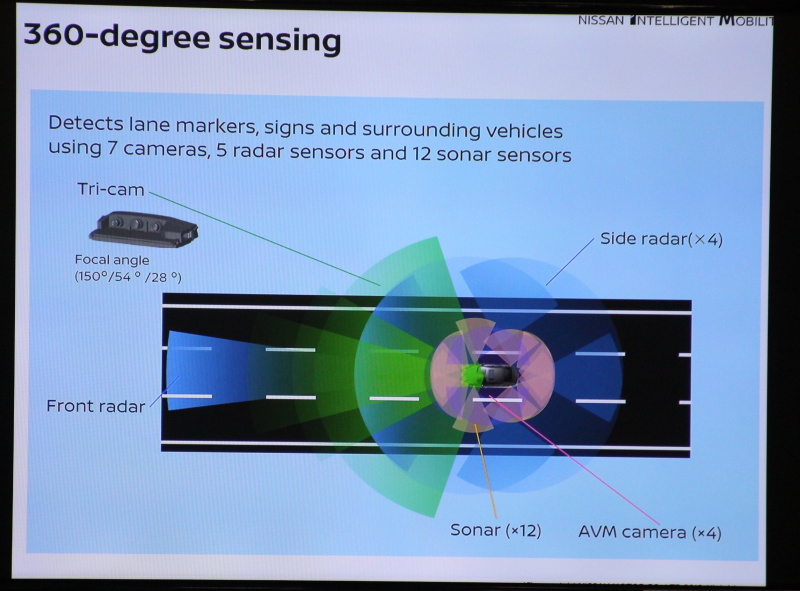
「プロパイロット2.0」に搭載されるシステムは、トライカム(画角150度/45度/28度)の3眼カメラをはじめとした計7つのカメラ(AVM(アラウンドビューモニタ)カメラが4つ)、5つのレーダー、12のソナーで白線、標識、周辺車両を検知するとしています。レーダーとソナーは最新の高解像度を備えたものを使い、細かい対象物のサイズ、場所の特定はカメラの映像を使っているそう。
サプライヤーについては現時点でアナウンスされていませんが、チップはモービルアイを使用しているそう。また「プロパイロット1.0」と同様に、信号や道幅も見ていて、一般道で作動しないように制御されると思われます。
なお、ADASで話題のライダー(LiDAR/Light Detection and Ranging)に関しては、現時点でレーダーとカメラの性能を超えるパフォーマンスを得られるものは現時点ではほとんどなく、この「プロパイロット2.0」のシステムで使う必要性はないと回答しています。
(文/塚田勝弘 写真/塚田勝弘、日産自動車)