
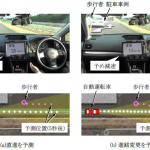
日立製作所、日立オートモディブシステムズ、クラリオンの日立グループ3社は、自動運転中に歩行者の動きを予測し、自動運転で歩行者との衝突を回避する基本技術を開発したことを発表しました。


(画像出典:日立オートモディブシステムズ)
この自動運転の新技術は、ロボットの移動経路を計算する際に使用されるポテンシャル法という方法に基づいて開発されました。
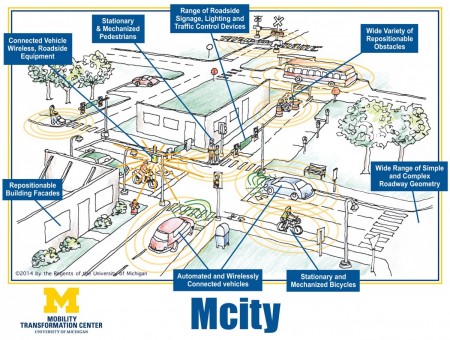
(画像出典:ミシガン大学MTC)
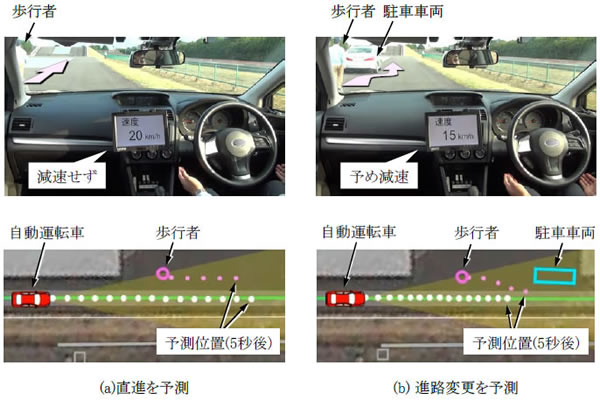
新技術では、歩行者が駐車車両などを避けて歩行の進路を変更する行動をモデル化して、歩行者と自車の衝突が予測される場合には、車両の速度を減速するか、そのままの速度で走行するかを判断した上で、歩行者との衝突を自動運転で回避します。

(画像出典:ミシガン大学MTC)
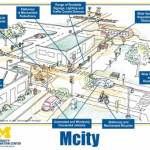
この新技術が可能になったのは、歩行者の行動をリアルタイムで予測できるようになったためで、今年7月からミシガン大学が開設した実験プロジェクト「Mcity(エムシティ)」で実車による実験を重ねていく、としています。
世界中の自動車メーカー・部品メーカー、さらにはグーグルなどのIT企業が自動運転に関する技術開発を進めています。今後、自動運転技術がどのように進歩していくのか、に注目が集まります。
(山内 博)


