

目次
■自動駐車や誤発進抑制に活躍
●小型で対象物の材質を問わない
装備するミラーやカメラを増やせば、車両周辺の死角をある程度なくすことはできますが、現実的ではありません。死角の情報を比較的容易に補う手法のひとつに超音波センサーがあります。
超音波を利用して障害物との距離を感知する超音波センサー(ソナー)について、解説していきます。
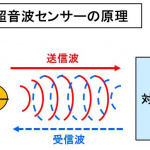
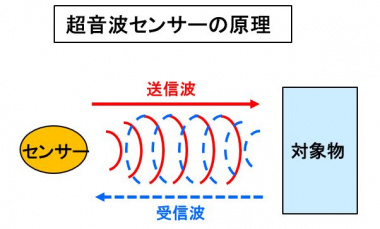
●超音波センサーの原理
超音波センサーは、物体に超音波を発射して、反射して戻ってくるまでの時間から距離を測定する装置で、ソナーとも呼ばれます。超音波は、犬やこうもりには聞こえますが、人間の耳には聞こえない20kHz以上の周波数の音波です。
超音波センサーは、圧電効果を利用した圧電素子で構成されます。
圧電素子は、電圧を印加すると超音波を発生し、超音波を受けると起電力を発生する特性があります。この原理を利用して、電気信号を超音波に変換して対象物に発射し、対象物によって反射してきた反射波を電気信号に戻して、対象物の有無や距離を測定します。
非接触かつ小型で対象物の材質を選ばないので、バンパーなどに埋め込んで障害物との隙間を検出するセンサーとして活用されています。一般的な使い方は、車両の後方の隙間を測定するバックソナーや四隅との間隔を測定するコーナーソナーなどで、駐車時に障害物の距離が一定以下になると警告音で知らせます。
超音波センサーの応用例として、自動駐車やAT誤発進制御について以下で紹介します。
●自動駐車での超音波センサーの役目
自動駐車のために必要なセンサーは、一般的には超音波センサーとカメラです。
駐車のスペースを検知するために、車両の前後と四隅のバンパーに超音波センサーを埋め込みます。超音波センサーによって、夜間や悪天候でも障害物を検知でき、距離が認識できます。画像として認識できるカメラは、白線や駐車枠を認識し、移動物体を検知するために必要です。
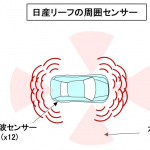
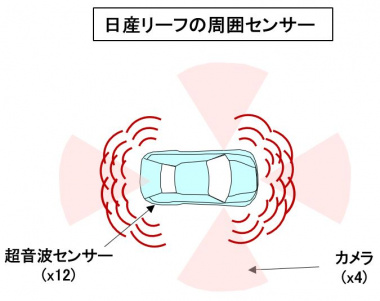
2017年発売の日産・リーフの自動駐車システム「プロパイロット・パーキング」では、車両周辺に12個の超音波センサーと4つの高性能カメラによって、周辺状況を認識しながら自動駐車を実現しています。
起動スイッチを押せば、駐車可能なスペースを検出して、ステアリングとアクセル、ブレーキ、シフトを自動制御して、並列・縦列駐車、前向き駐車、後向き駐車をしてくれます。
●AT誤発進抑制制御での超音波センサーの役目
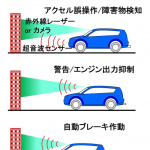
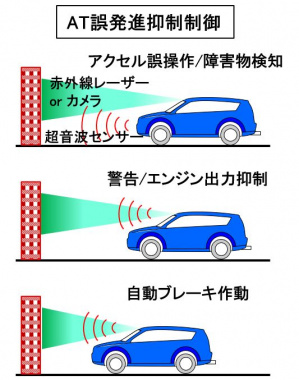
すべてのメーカーは、アクセルとブレーキの踏み間違い事故防止のため、AT誤発進抑制制御を採用しています。誤発進抑制制御のためには、車両の前方または後方の障害物を正確に認識する必要があります。障害物の検知手法はメーカーによって異なりますが、超音波センサーか赤外線レーザーが多用されています。
AT誤発進抑制制御は、一般的には以下のように作動します。
駐車操作など停止または車速約10km/h以下の低速走行時、進行方向に建物や壁などの障害物を検出した場合にアクセルを一定以上強く踏み込んだときに、制御が作動します。警報とともに自動的にエンジンの出力を抑え、急発進や急加速を抑制します。さらに障害物に接近すると、自動ブレーキが作動します。
近距離の障害物の検出法としては、超音波センサーの他にも赤外線レーザーやカメラがあります。それぞれ一長一短ありますが、超音波センサーはもっとも小型安価で使い易いですが、検出距離が2m程度までの近距離しか対応できないという使用制限があります。
超音波センサーは可視化する技術ではありませんが、どんな隙間でも検出できるという利点があります。自動運転では必要不可欠なセンサーですが、自動運転車でなくてもすでに10個以上装着しているクルマは珍しくありません。
(Mr.ソラン)


