

目次
■センサーによる認知や通信によるコネクテッド技術が必要
●ITや半導体の企業と連携することも
完全自動運転では、ドライバーに代わってシステムが周囲の環境を認識ながら、自律的に目的地まで運転を操作します。
完全自動運転の実現に必要な機能と先進技術について、解説していきます。
●完全自動運転に必要な機能とは
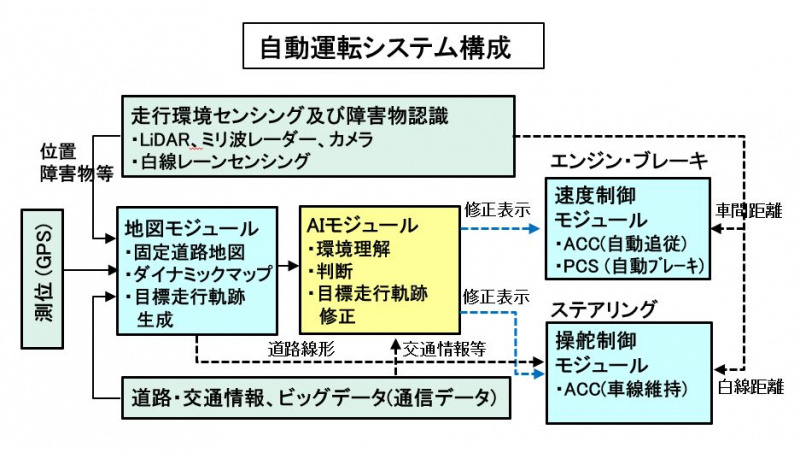
自動運転では、認知、判断、操作をドライバーに代わって、システム(制御プログラム)が行います。
自動運転が機能するためには、各種センサーを使った高度な認知技術や「AI(Artificial Intelligence人工知能)」を活用した適切な判断と走行プランニング、機敏な操作による車両の統合制御、通信を利用したコネクティッド技術などが必要です。
●高度な認知技術
クルマの現在位置を正確に特定し、周囲の状況を先読みするために、各種センサーやGPS(全地球測位システム)、高精度な「ダイナミックマップ」、通信技術によって得られる情報が使われます。
道路上の他車や周辺の障害物、自転車、人の位置や動きを認識するためには、さまざまなセンサーが必要です。ステレオカメラ、赤外線レーザー、超音波センサー、ミリ波レーダー、「LiDAR(ライダー)」が使われます。
LiDARは、「Laser Imaging Detection and Ranging(レーザー画像検出と測距)」の略称です。
レーザー光をパルス状に照射し、対象物から反射して跳ね返ってくる時間から距離や位置、形状まで計測できるセンサーです。レーザーを円形かつ上下にスイープすることで、全周囲(または広範囲)の障害物を3次元計測できます。また短い波長の赤外線を使うため、反射率の低い、小さな対象物まで正確に検出できます。(詳細については、別頁で解説)
今後、一般道で完全自動運転を実現するためには、LiDARの活用は必須です。
ダイナミックマップは、静的な高精度3次元地図に、渋滞情報や事故による通行規制など刻々と変化するリアルタイムの道路情報を更新する動的な地図情報を組み合わせたデジタル地図です。
●適切な判断と走行プランニング
AIは、各種センサーで検知した物体が何かを識別し、クルマをどのように操作をするかを判断します。さらに、周辺の状況から歩行者の飛び出しや他車の割込みなどを予測して、例えばシステムがブレーキをかける、急停止することを指示します。
AIは、ディープラーニング(深層学習)という手法によって、あらゆる物体のあらゆる事象のデータを蓄積して解析することによって、センシングによって得られた情報から何が何をしているかを認識し、次に何が起こるかを予測して次の操作を指示します。
また、どの経路や車線を走行すべきかの走行ルートの選択、走行プランニングもAIが判断します。
●コネクティッド技術
完全自動運転を実現するためには、クルマの技術だけでなく、外部と通信ネットワークでつながることが必須です。
クルマの走行状況がクラウド上で収集され、混雑や事故を避けた最適な走行経路を選択したり、故障や事故時の自動通報などができます。また車-車間通信や路-車間通信によって、センサーでは検知できない不慮の事故や見通しの悪い交差点での安全を確保します。
●機敏な操作
システムが、実際にクルマを動かすためには、エンジンやステアリング、ブレーキなどを正確かつ機敏に操作する必要があります。すでに車両の統合制御は、かなり高いレベルに達しており、機構制御は完成の域に近い状況です。
レスポンス良く制御できる電動化技術が、自動運転の発展に大きく貢献しています。
自動運転の開発領域は非常に広いので、多くの自動車メーカーは、IT企業や半導体企業、AI研究機関などと、協業/競争しながら開発を推進しています。
(Mr.ソラン)


