






目次
■どこまで高度なのか? トヨタ チームメイトを試してみた
さあ、ここらあたりからは車内外の使用性について語りたいところですが、今回はToyota Teammate(トヨタ チームメイト)についてのお話です。
新しいトヨタセーフティセンスの先進ぶりにも驚きましたが、トヨタ チームメイトにも目を見張りました。
●そもそもトヨタ チームメイトとは何ぞや?
「チームメイト、同じチームの仲間」…英語の辞書をひくと「teammate」の意味はこのように記されています。半ば日本語のようなものですから、別に調べなくてもわかる言葉です。
初めて「トヨタ チームメイト」を見たり聞いたりしたとき、トヨタ車に乗るユーザーが路上で困ったとき、電話してくれればいつでも販売店のひとがかけつけ、「お客様はチームメートと同じ。いつでもどこでも、困ったときでもそうでなくても声をかけてください」という、トヨタ販売店と顧客の結びつきをより深くする取り組みのことかと思いました。「teammate」なんて、おおよそ自動車のデバイス名称には思えなかったからです。
実は「トヨタ チームメイト」とは、トヨタセーフティセンスに並ぶ新しい運転支援デバイスの総称で、「人とクルマが、気持ちが通った仲間のような関係を築くように」というトヨタの願いを込めてのネーミングなのだと。いつでもどこでも、見ていないようで見守ってくれているというイメージで、このぶんだとクルマが感情を持ってしゃべるようになるのもそう遠くはないでしょう、「ナイトライダー」の「ナイト2000」のように。
さて、新型ヴォクシーに与えられたトヨタ チームメイトの機能は下記2つ。
・アドバンストパーク+パーキングサポートブレーキ(周囲静止物)/アドバンストパーク(リモート機能付)+パーキングサポートブレーキ(周囲静止物)

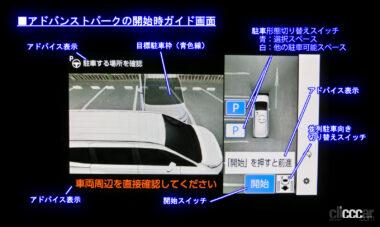
端的にいえば自動駐車システムです。画面表示や音声、ブザーとともに、ドライバーが「ここに」と狙った駐車スペースをクルマが把握し、駐車操作のスタートから終了まで、一連の操作をクルマが行います。ハイブリッド車は、専用アプリ「Remote Park」を入れたスマートホンにて車外から操作できるリモート機能付きです。
・アドバンストドライブ(渋滞時支援)

これまでの、分岐や車線変更、追い越しの支援を行う「アドバンストドライブ」に、自動車専用路での渋滞時に於ける運転操作機能を追加。「0~約40km/hでの、発進、停止、また発進が断続する渋滞時」、「レーダークルーズコントロール、レーントレーシングアシスト(LTA)が作動」、かつ「ドライバーが正しい運転姿勢にある」などを条件に機能します。
この渋滞時支援機能付アドバンストドライブはトヨタブランド初で、もっかのところ、搭載車は新型ノア/ヴォクシーのみ。先々、他のトヨタ車も折を見て追従するでしょう。
で、このトヨタ チームメイトというヤツがどれほどのものなのか、実践してみました。
●アドバンストパーク+パーキングサポートブレーキ(周囲静止物)
今回試乗したヴォクシーS-Zはガソリン車なので、試したのはリモート機能なしの「アドバンストパーク+パーキングサポートブレーキ(周囲静止物)」のほう。
クルマが自ら駐車操作を行う機能は、現行アクアやヤリスなどで先行していますが、冒頭で「目を見張る」と書いたのは、実はこちらアドバンストパークでした。
トヨタは駐車操作をクルマに行わせるデバイスの搭載は早く、筆者の認識に間違いがなければ2代目プリウスが最初で、インテリジェントパーキングアシストの名称で、第4回の写真に登場するクルマにもついています。ところがコイツがかなり使えず、うちの後期型ではいくらか改良されているものの、カメラに頼るだけのスペース認識が不安定、認識違いをしているときはドライバーが画面上で微調整しなければならず、「おいおい、こんなことをしている間に後ろからクルマが来ちゃうよ」というものでした。スペース把握がうまくいったかとスタートさせればスペースからズレて後退するしで、ハンドルが勝手にくるくる回るのを同乗者に見せて驚かせるには有効ですが、実際、いまはまったく使っていません。
この技術は、センサーによる空間認識把握機能の追加など、改良を受けながら以降のトヨタ車を転々とし、一時は姿を消したと記憶していますが、現在「アドバンストパーク」に名を変えてその思想を継続中。2代めプリウスのトホホっぷりを知っているだけに、今回ヴォクシーのアドバンストパークを試すにあたり、「お手並み拝見といこうじゃねえか!」と半ばケンカ越しで臨んだのですが、使ってみて「ははあ~、恐れ入りました」とひれ伏しました。


作動させるためのセンサーが豊富で、これはパノラミックビューなどで用いるカメラ、駐車時に障害物との距離を知らせるクリアランスソナーを総動員しています。
作動条件、というよりも開始条件は次のとおり。
・ブレーキを踏んでいる
・停車している
・運転席シートベルトを着用している
・ハンドルを操作していない
・アクセルペダルを踏んでいない
・ドアおよびバックドアが閉まっている
・ドアミラーが格納されていない
・パーキングブレーキがかかっていない
・レーダークルーズコントロールが作動していない
・ABS、VSC、TRC、PCS、PKSBが作動していない
・急勾配ではない
・TRCまたはVSCがオフではない
筆者が何に恐れ入ったか? 次の3点です。
・空いている駐車スペースにクルマを添わせた時点でアドバンストパークメインスイッチひと押しするだけで、クルマ自身がドライバーの駐車意志を汲み取り、スペースが1台ぶんならその場所を、数台ぶん空いているならそのうちの1台ぶんスペースを認識し、早々に狙いを定める点。
・2代目プリウス時代と同じ右左折バック、左右縦列駐車のみならず、アタマからスペースに入る前向き駐車も行う点。
・駐車操作だけではなく、出車操作まで行うこと。
そして最後、「おーおー、いっちょ前に」と、なんだかクルマがかわいく見えたのは、スペースの都合で一発駐車が無理と判断した場合、何と切り返しまで行う点です。

それもこれも、車両周囲のモニター表示、接近物を感知するカメラやクリアランスソナーを持ち合わせているからこそできることなのでしょうが、前進・後退の切り返しまでやってのけるとは!
さすがにシフトレバーのDとRの往復はドライバーに委ねられていますが、駐車位置決定からいったんの前出し、後退&ハンドル操作、完了まではクルマ任せです。
2代目プリウスの同システムでいちばんの欠点は、この最初の前出しがドライバー依存だったことでした。駐車スペースと前出し後の相対位置が正しくないとバックスタートからいきなり照準のハズれた軌跡をたどることになり、「役に立たないじゃないの!」ということになっていたわけです。
感心したのは、ちょっと不安にかられ、減速しようとブレーキ操作を加えてもクルマはきちんと「減速操作」と判断し、駐車操作を続行することです。この種のデバイスは、途中でブレーキを踏むとキャンセルするのが通例で、2代めプリウス(駐車アシストデバイス黎明期版と最新版を比較するのもひどいのですが)もブレーキ操作するや即キャンセルし、「あとは自分でやりな」とばかりに見放しますが、ヴォクシーはドライバーとともに駐車することを拒みません…なるほど、Teammateだ。
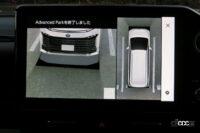
写真は街の施設の駐車場で行った操作ですが、白線のぴったり真ん中に駐車してくれました。






















では自宅の車庫ではどうかと試してみたのですが、これはダメでした。何度も何度も前進・後退をしながら切り返し操作をした挙げ句(これがなかなか愛らしかった)、写真を撮りそこねましたが、狭いだかスペース不足だかという理由でできませんというメッセージをモニター表示してアシスト中止。その次に「もう少し広い家に住みましょう」とでも出ればおもしろかったのですが…
●アドバンストドライブ(渋滞時支援)
「渋滞時」という文句はないものの、高速道路など自動車専用道でのノロノロ走行で、ハンドル操作を加えながら先行車に追従するデバイスは、SUBARUが2017年時の改良型レヴォーグ(旧型)で先行しており(アイサイト・ツーリングアシスト。)、筆者はこの時点で試乗しています。

最新のアイサイトは確かめていませんが、トヨタのアドバンストドライブも機能としては似たようなもので、レーン内維持、加減速・停車・発進を、高速走行時のみならず、渋滞の中でも行ってくれるというものです。
ちょっとやそっとの時間・距離ならいいのですが、ゴールデンウィークや夏休みなど、ドライブシーズンに発生する、解消まで数時間かかる何十キロもの渋滞時などには大きな助けになるでしょう。
このアドバンストドライブの渋滞支援機能を確認すべく、夕方になると例外なく渋滞になる外環自動車道と、5号池袋線を挟んでC1環状線に向かいました。

外環道から5号線に入るには美女木ジャンクションを通過しなければならないのですが、試用前にいったん新倉PAにて説明書で確認し、出発して本線に入ったらもう道は混んでいて、さっそくアドバンストパークが起動しました(当然、レーダークルーズはON。)。
細道から幹線路、ICやPAから高速路…合流先が渋滞していたなら車速が落ちるという動きはどちらでも共通なのに、ここでアドバンストパークが起動するのは、システム起動の要否を、ナビ地図と照合して現在地を自動車専用道であるとしているからでしょう。
システムは14もの条件をすべて満足したときに働くのですが、その中に「高速道路・自動車専用道路の本線にて渋滞走行しており、車速が約40km/h以下であるとき」「T-Connectご利用契約中(コネクティッドナビ装着車)」とあります。そうとわかっていても、即座に起動してメーターに知らせるという判断の速やかさに感心。その表示も先進性を抱かせる色づかいで、「ここではどんな運転技量を見せてくれるのかな?」と期待させます。もちろんお楽しみで使う機能ではなく、あくまでも運転支援システムですが、新型ヴォクシーを手に入れたばかりの人なら、ここでワクワクしなければ嘘でしょう。
合流後の速度は、渋滞というほどでもなければ流れがあるというものでもない、ちょうどシステム起動の境となる40km/h前後といったところ。まるで周囲のクルマたちが筆者の目的を知っていて協力してくれているかのようでしたが、車速が落ちればシステムが起動、流れが復帰すれば停止を繰り返しました。
美女木ジャンクションは、JCTへの分岐が始まるはるか手前の本線から渋滞が始まります。5号線に入るべく、クルマの最後尾につくとまた起動。先の信号が青になれば順繰りでジリジリ進行、赤で先行車が停止すればこちらも停止、停止後約3分以内に相手が進めばこちらも再スタート…高速路の長距離・長時間の渋滞がイヤなのはここで、止まったと思ったらすぐ発進、止まりそうになったと思ったらまた加速、止まりそうになったと思ったら発進…かと思ったけれどやっぱり止まった、逆に停止時間が長く、うかつにぼんやりしていたら前のクルマは3台ぶん先に進んでいて、横からクルマが車線変更してきたなどといった、想像しにくい動作が不連続に起きることで、確かに観光地からの帰り道、このようなシーンに出くわせばストレスも溜まってくるというものです。出口が近いのでもなければ迂回のしようもありません。今回のテストではさすがにこのようなシーンには遭いませんでしたが、観光シーズンの渋滞などでは大きな威力を発揮してくれるものと思います。








さて、渋滞下、停止・発進・加減速をクルマが行う様子を、クルマがジャンジャン流れる本線脇でクルマの動きを観察しましたが、狙いどおりの働きをしてくれました。


ただ、ここまではほとんど直線路。本領発揮の場は、これまた夕方にかなりの高確率で混雑するC1環状線です。5号線は割と空いていてスイスイ滑るように走ることができ、アドバンストドライブの出番はありませんでしたが、C1左まわりに進入したら、実にほどよい渋滞が発生していました。と、ここで「待ってました!」とばかり、またシステムが覚醒。道は輪っかになっていてカーブが連続している環状線。ここではハンドル操作も併用して先行車に追従してくれました。




先述したSUBARUのアイサイト・ツーリングアシスト、そして最新レヴォーグに搭載されているアイサイトXには、白線が認識できない場所(かすれている、または周囲のクルマが白線をまたいでいてクルマが白線を認識できないなど)では先行車の軌跡を捉えてハンドル操作する機能がありますが、トヨタ チームメイトはそこまでには対応していないようです。また、渋滞時の追従機能の作動速度域は、旧レヴォーグのツーリングアシストでは約60km/h以下、最新アイサイトXが約50km/h以下、そしてこのアドバンストドライブが約40km/h以下となっていますが、このへん、実用上は何の問題もないでしょう。普通のひとはヴォクシーとレヴォーグを同時に買ってとっかえひっかえ乗ることは事実上ないからです。

ひとつ注文が。
ここまで述べた機能は、たといハンドルから手を放していても、ドライバーが前を向いて周囲を状況監視していることを前提に働きます。そのドライバーを監視しているのは、ハンドル向こうに設置されているドライバーモニターカメラなのですが、このモニターがメーター下部の視認性を阻害していました。
何しろドライバーの顔の位置、向きばかりか、目の開閉状況をも監視しているわけですから、ハンドルコラム上しか適当な場所はないのでしょうが、メーターが部分的に見えないのも困る。ここはひとつ発想を変え、いまならエアバッグとの両立性の懸念はありますが、ひと頃日産がセドリック/グロリアに用いていた、パッド部だけ非回転式にしたハンドルにし、固定したパッドに移せないかと思いました。
最後に。
いいと思ったのは、トヨタセーフティセンスの他の機能もそうなのですが、これだけ高度な働きをするデバイスなのに、メーター内で設定をONにしておけば、レーダークルーズを働かせるだけで、そして条件が整いさえすれば、即、アドバンストドライブが起動することです。高速路にいるかどうかはクルマが判断、ドライバーの追加操作を必要としないのがいい。いちいちスイッチを入れたり切り替えたりという煩わしさはドライバーを億劫がらせ、結局は使わずじまいということになりかねません。
そしてドライバーに邪魔だと思わせることのない、自然な挙動で働くのも優れたところです。何でもないことのようですが、ここらあたりのさじ加減が開発陣にとって苦労したところでしょう。
ちょっとかけ足気味でしたが、以上、トヨタ チームメイトの感想でした。
(文・写真:山口尚志)
【試乗車主要諸元】
■トヨタヴォクシー S-Z (6BA-MZRA90W-BPXRH型・2022(令和4)年型・2WD・ガソリン・自動無段変速機・ホワイトパールクリスタルシャイン)
●全長×全幅×全高:4695×1730×1895mm ●ホイールベース:2850mm ●トレッド 前/後:1500/1515mm ●最低地上高:140mm ●車両重量:1640kg ●乗車定員:7名 ●最小回転半径:5.5m ●タイヤサイズ:205/55R17 ●エンジン:M20A-FKS(水冷直列4気筒DOHC) ●総排気量:1986cc ●圧縮比:- ●最高出力:170ps/6600rpm ●最大トルク:20.6kgm/4900rpm ●燃料供給装置:D-4S(筒内噴射+ポート燃料噴射) ●燃料タンク容量:52L(無鉛レギュラー) ●WLTC燃料消費率(総合/市街地モード/郊外モード/高速道路モード):15.0/11.4/15.3/16.9km/L ●JC08燃料消費率:- ●サスペンション 前/後:マクファーソンストラット式/トーションビーム式 ●ブレーキ 前/後:ベンチレーテッドディスク/ベンチレーテッドディスク ●車両本体価格:339.0万円(消費税込み・除くメーカー/ディーラーオプション)


