
目次
■一般道路での自動運転には、精度の高い3次元計測が不可欠
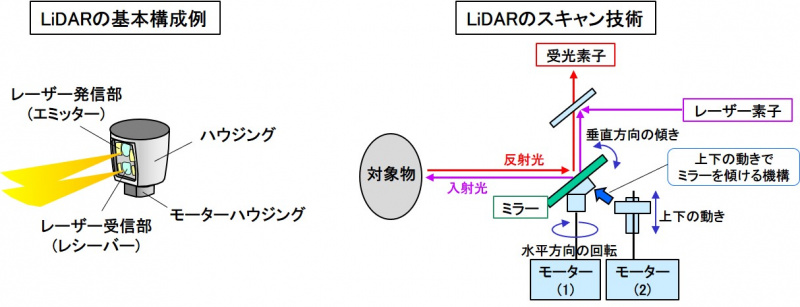
●レーザーを水平/垂直方向にスイープして全周囲(広範囲)の対象物を3次元計測
現在、自動車メーカーが目標としている条件付き自動運転レベル3以上では、短波長の赤外線レーザーを利用するLiDAR(ライダー)の採用が不可欠です。LiDARは、周辺の車両や障害物までの距離や位置、形状を精度良く3次元計測できることが、最大の特長です。
完全自動運転車用として注目されているLiDARの機能と必要性について、紹介していきます。
●LiDARとは
レーダーとは電波のことではなく、電波を放射してその反射波の到達時間や方向および強度によって、計測対象までの距離や方向を計測するためのシステムや装置を指します。
LiDARは「Laser Imaging Detection and Ranging(レーザー画像検出と測距)」の略称で、レーダーと同じような原理ですが、空間を伝播する波動として電波でなく、レーザーなどの光波を用いたものです。レーダーの電波を光波に置き換えたもので、レーザーレーダーとも呼ばれます。
一般にはレーザー光をパルス状に照射し、対象物から反射して跳ね返ってくる時間から距離や位置、形状まで計測できるセンサーです。
●LiDARの特徴
通常LiDARは、波長の短い赤外線を用いるので反射率が低い対象物、小さな対象物でも十分な反射波を受信できるので、高い精度で対象物の検出ができます。
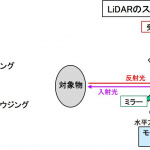
車載用LiDARの最大の特長は、レーザーを水平方向および垂直方向にスイープして全周囲(または広範囲)の対象物を3次元計測することです。
レーザーをスイープするためには、発信部本体か、反射ミラーをモーターで回転させる機構が必要です。回転機構がコストアップの要因になっているので、最近はレーザー光自体を制御してスイープさせるメカレスLiDARも開発されています。
●なぜLiDARが必要なのか
高速道路であれば、車線を維持するLKAS(車線維持システム)や自動で車線変更を行うLCS(車線変更システム)などの部分自動運転レベル2は、現行の「ミリ波レーダー+カメラ」の組み合わせで対応でき、すでに実用化されています。
一方で一般路での自動運転を見据えると、より精度の高いLiDARの採用が必須です。必要な理由は、以下の通りです。
・自車位置を特定するためのGPS情報の誤差(10m程度)は、障害物がなくスムーズに流れる高速道路では問題となりません。しかし、一般路の複雑な交通状況ではGPSの誤差は許容できず、また障害物によってGPS信号が受信できない頻度も増えます。
・ミリ波レーダーやカメラでは、周囲との正確な距離が把握できません。一般道路では、複雑な道路や狭い路地などを走行する頻度が高まるので、数cmの精度で距離が計測できるLiDARが不可欠です。
●LiDARを使った完全自動運転車の例
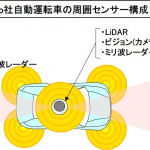
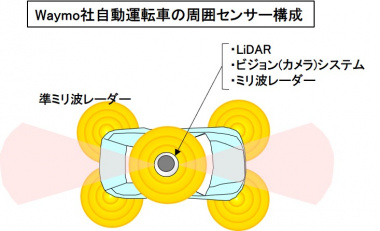
Waymo社(Google社の自動運転開発の子会社)の実験車は、ルーフの小型ドームにLiDARとカメラのビジョンシステム、ミリ波レーダーを格納し、クルマの左右前後4隅には準ミリ波(短距離)レーダーを装備しています。
小型ドームのLiDARで全方位を3次元で把握します。ビジョンシステムは、ダイナミックレンジの広いカメラの集合体で周囲360°を監視し、さらにミリ波レーダーで遠方の障害物を検出します。
またクルマの4隅の準ミリ波レーダーは、クルマの近くの人や自転車などを把握します。
自動運転におけるセンサーの「3種の神器」は、カメラとミリ波レーダー、LiDARです。カメラとミリ波レーダーは、性能向上を図りながら着実に低コストを実現し、多くのクルマで搭載されています。
一方、LiDARのコストは2020年頃でも300ドル前後(目標100ドル)であり、2020年頃にはLiDAR搭載車が出現しそうですが、一気に量産展開となるのは難しいと予想されています。
(Mr.ソラン)


