

■スタートアップによる日本初の2021年月面探査に期待
埼玉県でベンチャー企業・Dymon(ダイモン)を経営する元自動車エンジニア・中島紳一郎社長が手掛ける月面探査用ローバーが、米アストロボティック社が開発中の月着陸船に搭載されることになったそうです。

中島氏は自動車が電動化・自動化するなか、それに代わる究極のモビリティーを作りたいとダイモン社を起業。その後8年をかけて月面ローバーの構造を完成させ、2輪を駆使して転んでもすぐに起き上がって走行可能な構造から同車のネーミングを「YAOKI」と命名。そう、その語源は「七転び八起き」。
宇宙を舞台に活動する探査車の開発はハードルは高いものの、実現すれば日本の宇宙スタートアップにとって新たな一歩となります。
一方、「YAOKI」を月まで運ぶ手段については未計画だったため、中島社長は3Dプリンターで樹脂製の月面ローバー試作車を製作。社長自ら動画を作成してYouTubeにアップ、米国の宇宙産業にSNSで売り込みました。
すると2021年に向けて月着陸船を開発中の米アストロボティック社がそれを見て「YAOKI」の搭載を決定。
米ロケット大手のユナイテッド・ローンチ・アライアンスが2021年にフロリダ州から打ち上げるロケットを使って着陸船の初号機を月に送る計画になっており、同機に搭載されることに。
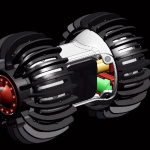
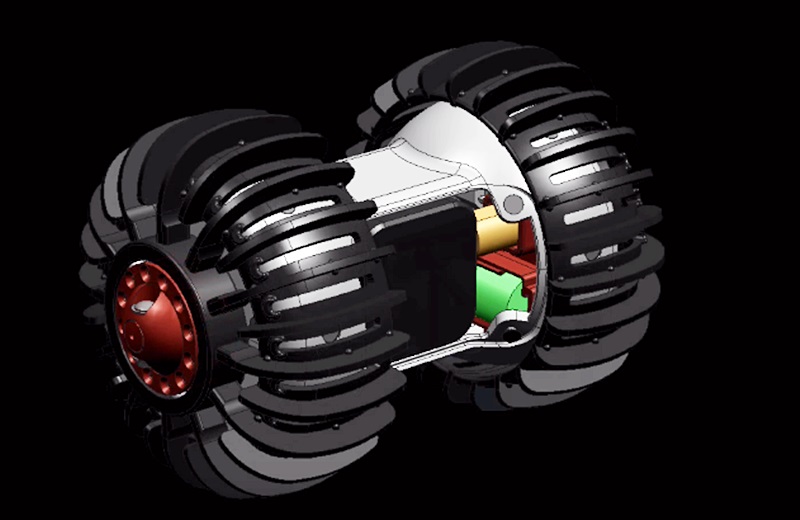
Dymon社が今回開発する「YAOKI」は幅と奥行きが15cm、高さ10cmの小型月面ローバー。車輪とカメラを組み合わせたシンプルな設計で、月への輸送コストが1kgあたり約1億円とされるなか、重量が600gに抑えられています。
2輪のため、月面の砂の上でも横転せず走り続けることが可能で、月着陸船とのWi-Fiによる通信を経由して地上から遠隔操縦する計画になっており、月面上を走行中、ボディー中央の小型カメラで撮影した映像を地球に送信します。
車輪が車体を覆っており、100G以上に耐えられる強度を持ち、横転しても、ひっくり返っても走行可能なのが「YAOKI」のウリ。
月面探査車を地球上から遠隔操作する場合、通信遅れが約4秒程度生じることから、その通信遅れの間に、岩に乗り上げる等、不測の事態が生じても走行可能。
Dymon社は2021年に向け、金属加工を得意とする東新製作所の協力を得て、月面の環境に対応するよう耐熱性などを高めた月面ローバーを製作する予定で、プロジェクトの総額は3億円程度になる模様。
将来的には複数機を月面に着陸させ、水などの資源探査に使えるようにする構想のようです。
スタートアップによる日本初の月面探査に大いに期待が高まります。
(Avanti Yasunori・画像:Dymon)
【関連リンク】
Dymon
http://dymon.co.jp/index.html
ASTROBOTIC
https://www.astrobotic.com/


