







目次
■潜在リスクを認識すると減速する危険予測マップ技術
●一般道で欠かせない「かもしれない運転」を自動運転に
突然ですが、ADって言葉をご存知でしょうか?
テレビの撮影現場でカンペを出したり、お弁当の買い出しに行ったりするお仕事…ではありません。自動車業界でADといえば「自動運転(Autonomous Driving)」のことです。VTECやLSDなどクルマにまつわる略称は色々ありますが、これから自動運転に関する研究・開発が進むにつれて、ADという言葉を耳にする機会はますます増えていくことでしょう。
とはいえ、ADが一般的に普及するには、まだまだ課題が多く残されています。工場や倉庫の敷地内といったクローズドな場所では普及の可能性が高いものの、様々な条件が複雑に絡み合う一般道でのADの実用化はかなりハードルが高いというのが現状のようです。
そんな中、日立オートモティブシステムズでは一般道での自動運転実用化に向けた制御システムの開発に取り組んでいます。走行環境から衝突リスクを予測して、擬似的にマップ化してそれを認識、さらにリスクを回避できるような走行制御を行うというものです。これを「危険マップ予測技術」と言います。
我々は、一般道を走行している際、路肩にクルマが停車していると「ひょっとすると物陰から飛び出しがあるかもしれない」など、危険を予測しながら運転しています。日立オートモティブシステムズの新制御システムは、その「かもしれない」運転を自動運転に取り入れたものです。
今回、日立オートモティブシステムズの十勝テストコースにおいて、テスト車両によるデモンストレーション走行を体験することができました。

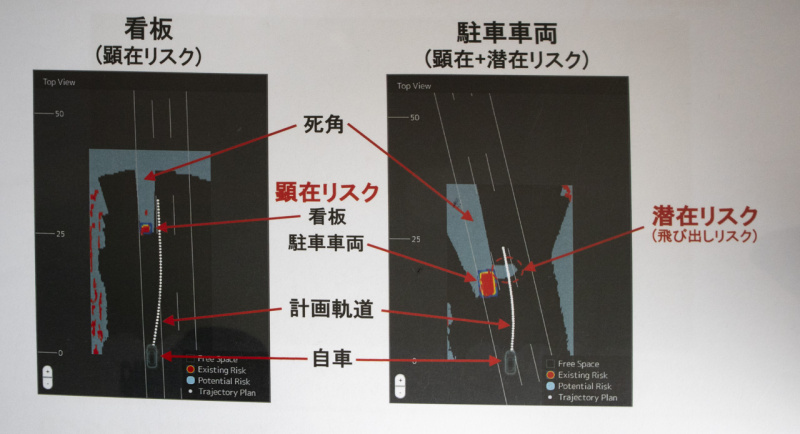
オーバル路の長い直線の左側には、看板と駐車車両が配置してありました。40km/hで自動走行しつつ、それらを危険予測マップを用いて回避します。

まずは看板が近づいてきました。看板は潜在リスクなしと判断されたため、減速せずにステアリング操作だけで避けて、走行を続けます。


続いて、駐車車両が迫ってきました。駐車車両は、その奥に歩行者などが潜んでいる「かもしれない」という状況を想定して、飛び出しのリスクを予測。そこで、駐車車両に自車が差しかかる前にあらかじめ減速し、本当に歩行者が潜んでいて飛び出してきたとしたら、自動ブレーキで停車することができる程度の速度で走行します(今回は15km/hまで減速)。

駐車車両の近くまで来てカメラが死角の内側までとらえられるようになり、何も危険がないことが確認できたら加速して元の速度に戻りました。

●センサー情報だけで車線を認識して自動運転
十勝テストコースのオーバル路では、「センシング地図技術」のデモンストレーションも行われました。
これは、高精度地図やGPSなどの情報が取れないような状況においても、センサーの情報から高精度地図の情報を復元してADを行うというものです。今回は、そのうちの車線認識部分が紹介されました。
画面上の左側には白い点がたくさんあります。これはLIDAR(ライダー)が白線の候補点として表示しているものです。LIDARはレーザー光を使って物体までの距離や形状を検知するのですが、物体が何かを認識するのは難しいそうで、コース内側にある草むらも白線と誤認識してしまっているため、白い点がたくさん表示されています。一方、ピンクの三角の印は、ステレオカメラで認識した白線です。

この二つのセンサーから得られた情報を総合して、白線を認識します。それが、画面上のピンクと黄色の線です。そして、2本(以上)の線が認識されれば、その中間の部分は走行レーン(ピンクの帯)と判断できます。これを地図として出してやることで、高精度地図やGPSなどの情報が取れないような状況でもADがやりやすくなるというわけです。

AD(自動運転)において、いかに事故のリスクを減らして安全性を担保できるか。日立オートモティブシステムズの開発は、これからも続いていきます。
(長野達郎)


