



目次
■レベル3以上の自動運転に欠かせない装置
●実用化には劇的なコストダウンが必須
現在各メーカーが目標としている条件付き自動運転レベル3以上では、距離や位置、形状をより高い精度で計測するために、LiDARの採用が必須です。
自動運転車用として注目されているLiDARの機能と必要性について、紹介していきます。
●LiDARとは
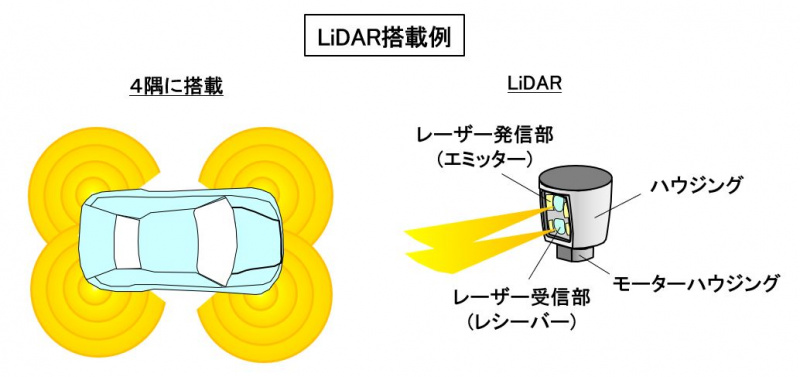
LiDARは、「Laser Imaging Detection and Ranging(レーザー画像検出と測距)」の略称です。
レーザー光をパルス状に照射し、対象物から反射して跳ね返ってくる時間から距離や位置、形状まで計測できるセンサーです。レーザーを円形かつ上下にスイープすることで、全周囲(または広範囲)の障害物を3次元計測できます。また短い波長の赤外線を使うため、反射率の低い、小さな対象物まで正確に検出できます。
●なぜLiDARが必要なのか
高速道路であれば、車線を維持するLKAS(車線維持システム)や、自動で車線変更を行うLCS(車線変更システム)などの部分自動運転レベル2は、現行の「ミリ波レーダー+カメラ」の組み合わせで対応でき、すでに実用化されています。
一方で一般路での自動運転を見据えると、より精度の高いLiDARの採用が必須です。必要な理由は、以下の通りです。
・自車位置を特定するためのGPS情報の誤差(10m程度)は、障害物がなくスムーズに流れる高速道路では問題となりません。しかし、一般路の複雑な交通状況ではGPSの誤差は許容できず、また障害物によってGPS信号が受信できない頻度も増えます。
・ミリ波レーダーやカメラでは、周囲との正確な距離が把握できません。一般道路では、複雑な道路や狭い路地などを走行する頻度が高まるので、数cmの精度で距離が計測できるLiDARが必要です。
●現在提案されている完全自動運転車
1) Waymo社 (Google社の自動運転開発の子会社)
ルーフの小型ドームにLiDARとビジョンシステム、ミリ波レーダーを格納し、クルマの左右前後4隅には準ミリ波(短距離)レーダーを装備しています。
小型ドームのLiDARで全方位を3次元で把握します。ビジョンシステムは、ダイナミックレンジの広いカメラの集合体で周囲360°を監視し、さらにミリ波レーダーで遠方の障害物を検出します。またクルマの4隅の準ミリ波レーダーは、クルマの近くの人や自転車などを把握します。
2) テスラ
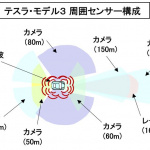
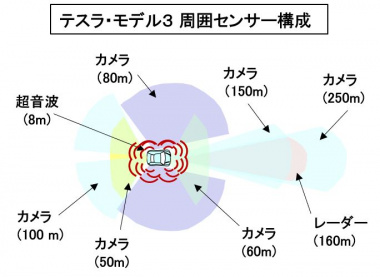
市販化されているモデル3とモデルXの「オートパイロット」は、ハードは完全自動運転を視野に入れた装備となっています。現段階では法規や事故責任の制約から、実機能は自動運転レベル2です。視認距離が50m~250mまでの8台のサラウンドカメラと前方ミリ波レーダー1基、超音波センサー12基を装備しています。
法的な制約がなくなれば、制御ソフトをアップグレードして機能をレベル3やレベル4にアップグレードできると公表しています。LiDARを使わずに周囲に多数のカメラを搭載して対応していますが、LiDARを使わずに完全自動運転まで対応できるかについては、疑問を呈する人もいます。

●テスラの事故が残した課題
2018年3月に発生したテスラ・モデルXの死亡事故は、「オートパイロット(半自動運転)」で高速道路を走行中に、ドライバーがシステムの警告を無視し続け、ハンドルを握らず操作しなかったため発生したと、テスラ側は主張しています。
これを、単純に半自動運転時のドライバーの責任である、ヒューマンエラーと片づけてよいのか、システムがさらにカバーする必要があるのかなど、まだ議論の余地があります。
2012年にスタートしたGoogle社の自動運転実験車のルーフに搭載していたLiDARは、数100万円でした。現在も数10万レベルで、さらに他のセンサーも必要なことから、レベル3の条件付き自動運転車が市販化できたとしても、高価なクルマになります。私たちに手の届くようになるのは、まだまだ先になりそうです。
(Mr.ソラン)


