
将来的には車両間のデータを共有し、複数のコネクテッド・カーが連携し合うことで、車線変更や交差点の通行をより容易に、安全にするとしています。
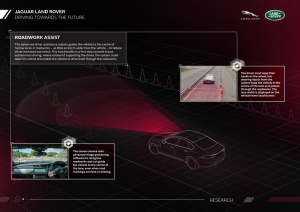
具体的な技術として「ROADWORK ASSIST(ロードワーク・アシスト)」を搭載。
前向きに設置されたステレオカメラを使い、前方道路の3Dビューを生成し、高度な画像処理ソフトウエアと連携させることで、コーンや障害物を認識することが可能。

同システムにより、車両が道路工事の開始地点に接近していることを検知し、込み入った建設現場や一方通行道路があることを知らせます。わずかな力でステアリング操作をアシストし、ドライバーが車線中央を走行し続けることができるようにサポートするものです。
また、無線信号を使用し、車両間で関連データを送受信するデバイスをテストする研究プロジェクトの一環である「OVER THE HORIZON WARNING(視野外警告)」も実施されます。
車両が独立して通信し、ドライバーと自律運転車両に見通しが悪く、目視できない場所にある危険や障害物を警告。
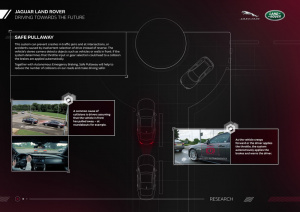
ほかにも、車両を減速か停止させることで、ほかの車両に危険が生じる場合、付近の車両に「Hazard Ahead(前方危険)」警告を送信する機能も搭載されます。
また、コネクテッド技術を搭載した緊急車両が周囲の車両と通信し、ドライバーが警告灯やサイレンに気が付くよりも先に、緊急車両に搭載されたデバイスがその接近を配信する機能なども開発項目に入っています。
これらが実現すると完全自動運転車両も現実味を帯びてくるように感じさせますが、手動運転車両、部分自動運転車両、完全自動運転車両の混在期間をどう運用していくかなど、課題は山積しているのは間違いないでしょう。







(塚田勝弘)
【関連記事】
ジャガー・ランドローバーはあらゆるオフロードを走破できる「オールテレイン自律運転技術」を目指す
https://clicccar.com/?p=389415


