


いすゞ自動車(以下、いすゞ)と日野自動車(以下、日野)は、自動走行・高度運転支援に関わるITS技術を共同開発することを合意したと発表しました。

今回の合意の背景には、慢性的なトラック運転手不足解消と省エネルギーの達成には、会社の枠を超えたITS技術の共同開発が欠かせないという事情があります。
2013年に終了したNEDOのエネルギーITS推進プロジェクトで、日本のトラックメーカー4社は、大型トラックの隊列走行実験に成功しており、今後両社はNEDOプロジェクトで開発された要素技術の実用化に共同開発で取り組むものと見られます。
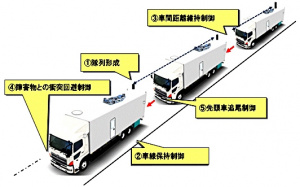
NEDOプロジェクトで開発された大型トラックの隊列走行に必要な要素技術は次の5項目です。
・隊列形成:個々の車両の位置を認識して隊列を形成し管理する技術
・車線保持制御:道路端の白線を認識して操舵を制御する技術
・車間距離維持制御:車車間通信と車間距離検出によって車間距離を制御する技術
・障害物との衝突回避制御:障害物を検出し、レーンチェンジや非常ブレーキ制御を行う技術
・先頭車追尾制御:分合流部、降雪や悪天候時などの白線認識不可時に先行車を認識し追従する技術
米国ではロボット技術を活用したトラックの隊列走行実験が行われ、欧州では互いに通信しながら隊列走行する自動運転トラックが欧州横断に成功したという情報もあり、今後いすゞ・日野の両社は大型トラックの隊列走行に必要なITS技術の共同開発を急ぐものと見られます。
(山内 博・画像:NEDO)


