

目次
■「パッシブ型」と「アクティブ型」に大別できる
●パッシブ型は軽自動車やコンパクトカーが多く採用
オンデマンド4WDは、パートタイム4WDのような手動切り替えではなく、走行状況に応じて2WDと4WDを自動で切り替える駆動方式です。
現在4WDの主流であるオンデマンド4WDの構成や特徴について、解説していきます。
●オンデマンド4WDとは
オンデマンド4WDは、スタンバイ式4WDとも呼ばれ、通常は2WDで走行し、状況(要求)に応じて自動で4WDになるシステムです。駆動力制御と応答性の違いで、「パッシブ・オンデマンド4WD」と「アクティブ・オンデマンド4WD」に分けられます。
●パッシブ・オンデマンド4WD
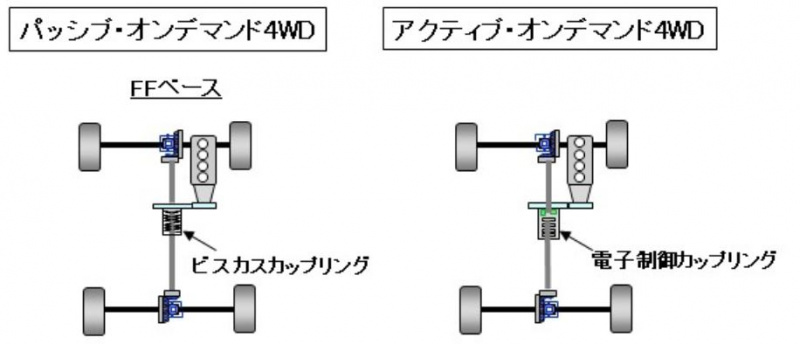
かつて多く採用されていたのは、ビスカスカップリングで駆動力を前後輪に分配するパッシブ・オンデマンド4WDです。通常は2WDで走行し、悪路で駆動輪が滑り始めると、前後輪の回転差に応じて駆動力を後輪に伝えて4WDにします。
駆動輪のスリップを検知して、滑り始めてから4WDになることから「パッシブ(受け身の)・オンデマンド」と呼ばれています。タイムラグがあって4WDになることから、「なんちゃって4WD」と揶揄されることもあります。
最近は、後述のアクティブ・オンデマンド4WDが主流となっていますが、コストがかからないのでスズキ・ハスラーやワゴンRなど軽自動車、コンパクトカーで採用されています。
●シリコンオイルの粘性を利用
ビスカスカップリングは、シャフトとともに回転するインナープレートと、ケースとともに回転するアウタープレートが交互に配置され、その中に粘性の高いシリコンオイルが満たされています。両者に回転差が生じると、オイルのせん断力によって、遅いシャフト(被駆動軸)は滑っている速いシャフト(駆動軸)に連れ回されます。さらに回転差が大きくなると、プレートどうしが密着して直結の4WDになります。
●アクティブ・オンデマンド4WD
アクティブ・オンデマンド4WDは、パッシブ・オンデマンド4WDのビスカスカップリングの代わりに、高度な電子制御カップリングを使います。滑ってからではなく、滑りを予知する高精度制御によって応答性を向上させています。
予知制御とは、環境条件や路面状況、ドライバーが気づかないレベルの車両の挙動などの情報から、滑りを予知してタイヤが滑り出す前に、駆動力配分を制御する手法です。さらに、エンジンやブレーキなどとの車両統合制御によって、刻々と変化する車両の状況に素早く対応し、最適な駆動力制御を実現します。
本格的なセンターデフ式フルタイム4WDに比べると軽量でコストもかからないので、現在はSUVや高性能車で主流となっています。マツダ・CX-5 (i-ACTIV)やホンダ・ヴェゼル (リアルタイム4WD)、BMW・X3 (xDrive)など多くのモデルで採用されています。
●電子制御フルタイム4WD
スバルのXVやフォレスターの「ACT(アクティブ・トルク・スプリット)-4WD」は、電子制御フルタイム4WDと呼ばれています。通常は前輪と後輪のトルクが60:40に配分され、若干FF寄りのトルク配分を基本としながらも、4輪の駆動状況を常にモニタリングしながら、必要に応じてトルク配分率を100:0~50:50まで変化させる4WDシステムです。
トヨタのプリウスが4WDを設定したことからもわかるように、4WDはマニアックな機能でなく、市街地からオフロードまで走れる多目的な機能として位置づけられ始めています。
したがって燃費の悪化は許容できないため、燃費と性能を両立させるオンデマンド4WDが普及してきました。
(Mr.ソラン)


