



パイオニアと位置情報クラウド企業のHEREは、自動運転向け地図を効率的に更新・運用するシステムの実用化へ向けて、実証実験の協業に合意したと発表しました。
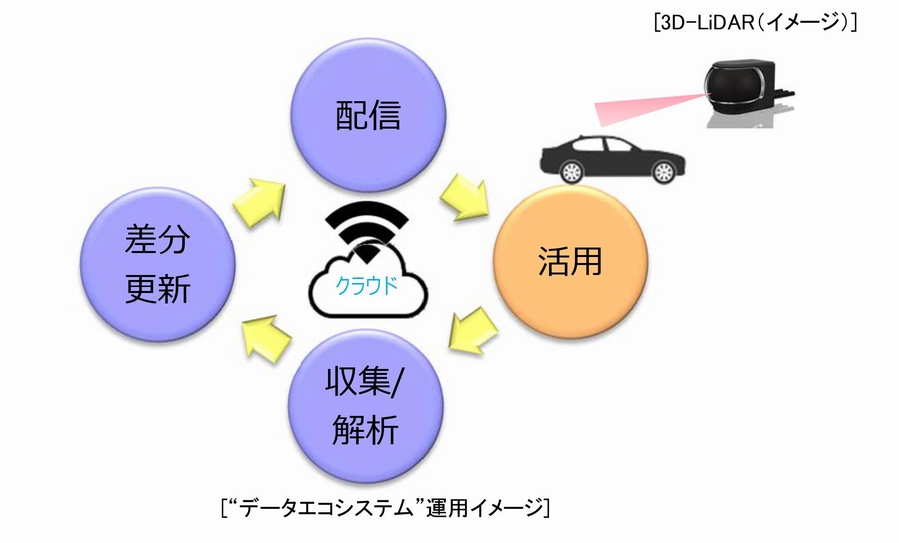
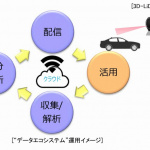
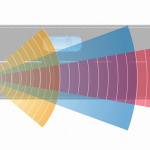
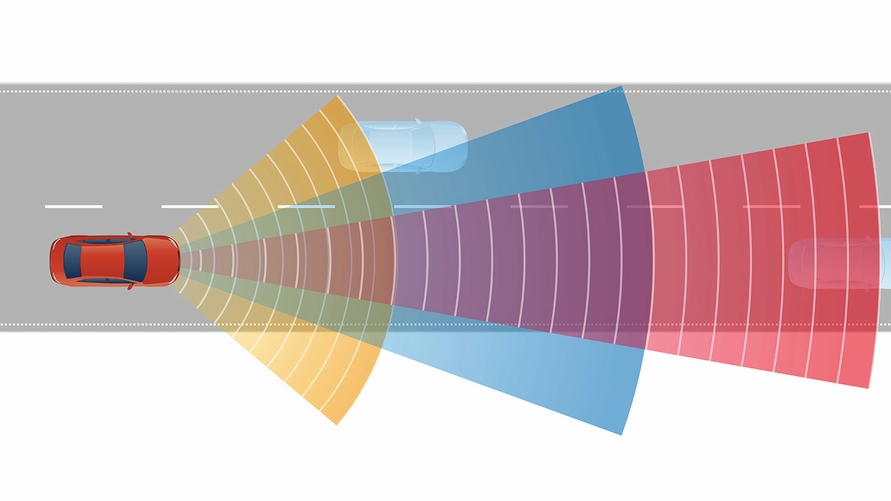
今回両社が協業を進めるのは、パイオニアの走行空間センサー「3D-LiDAR (以下、3D-ライダー)」とHEREの自動運転向け高精度地図を活用して、自動運転向け地図を効率的に更新・運用する”データエコシステム”の構築に向けた実証実験です。

両社は自動運転時代に向けて、両社の保有する技術の活用について協議を進めてきました。”データエコシステ ム”の構築には、自動運転向け地図の更新データを抽出するための高精度な自車位置推定技術が必要です。
今回の合意により、両社はパイオニアの「3D-ライダー」とHEREの自動運転向け高精度地図を組み合わせて自車位置推定の実証実験を開始し、自動運転向けの地図を効率的に更新・運用する”データエコシステム”の実用化を目指すことになります。

パイオニアは光ディスク関連技術を活かし、車載用途に適した高性能で小型・低コストな「3D-ライダー」の開発を進めており、一般車両からの周辺情報を自動的に収集 し、高度化地図データを更新して配信する効率的な整備・運用システム「データエコシステム」の構築・提案を目指しています。
HEREは、もともとノキア系のモバイル機器向け地図データ会社でしたが、2015年にドイツ系の自動車大手によって買収され、自動運転用の高精度地図をクラウド上で運用する技術を開発してきました。HEREの出資会社には、AUDIを通じてのVWグループ、BMW、ダイムラーが名を連ねています。
(山内 博 画像:パイオニア・HERE)


