日本の最先端の自動車技術を展示する「人とくるまのテクノロジー展2014」、今年の企画展示は、「人と社会に優しい先進クルマ技術」サブタイトルが「2020年の『モビリティ』・『カーロボティクス』を体験しよう」というもの。
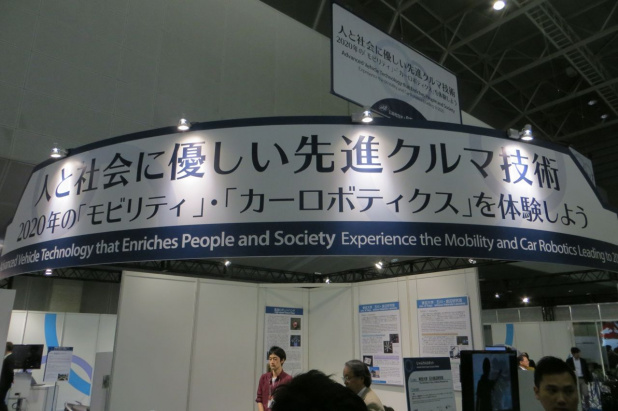
カーロボティクスはクルマがロボット化していくという意味でしょう。自分で判断して行動していくクルマが2020年の東京オリンピックまでに実現させるという意気込みを含んでいると思われます。
実際にクルマがロボットのようにすべてのシーンで完全自動運転はともかく、道路や環境を限ったり、危険な特定の場合などクルマがサポートしていくのは間違いなく進んでいくはずです。
そのために必要なこととしての最先端が企画展示されています。
まずは東京大学のじゃんけんロボット。自動運転するくらいならじゃんけんくらいできなければなりません。
具体的には、人間が出した手の形を瞬時に読み取り、それに勝つグーチョキパーを即座に出す、というものです。高速ビジョンが1000fps(1秒間に1000コマ)読み取り、画像処理し、ロボットハンドは0.1秒で180度の開閉運動を行ないます。
その様子はこちら。
これくらいの画像検知、処理、判断、そして操作を行う速度が求められるというわけです。
ちなみに人間の目は30fpsくらいの認識らしく、この「後出しじゃんけん」は見破られないとのことです。
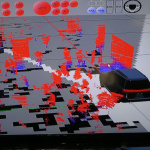
日産自動車のリーフは、前方にあるものを判断している仕組みを展示。

カメラやセンサーで車両の前方に人間を感知すると、ステアリング上部が赤く変化します。実際にはそれを避けるような動きをして運転しているというイメージを伝えるため、モニター上に赤くなっている部分が車両前方の人や障害物、青い部分はしないと判断しているわけです。


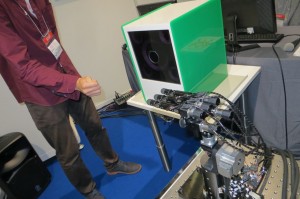
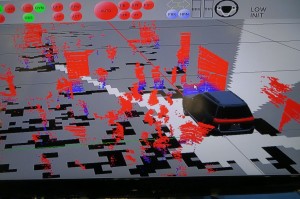
金沢大学では、周囲の状況を車両上部のレーザーセンサーで感知するシステムを展示しています。


車両上部にあるクルクル回っているセンサーによって、クルマの周囲360度に障害物があるか、どこが地面なのかを認識しています。
また、運転の自動化には正確な地図も不可欠です。
ヒーロー戦隊ものの車両にも見えるアイサンテクノロジーのこの車両は、走るだけで3Dのロードマップが出来上がるモービルマッピングシステムです。単なる線の道路地図でなく、ガードレールの位置や勾配などもわかる、3次元で把握できるマップは、ますます必要とされるでしょう。


このように、自動車産業として、より「自動化」が進められている事、そしてその要素技術にどのようなものがあるかがわかる企画展示でした。
(小林和久)