
目次
■車の運転支援と自動運転とは
現在、自動車の技術として、注目されているのは、電動化とともに自動運転ではないでしょうか。すでにさまざまな運転支援技術が実用化され、その延長線上に自動運転がありますが、まだまだ解決すべき課題も残っていますが、着実に進化し続けています。
運転支援から自動運転に至る技術と自動運転のメリットと直面する課題について、解説していきます。
自動運転の狙いとメリット
自動運転では、ドライバーに代わってシステムが周囲の環境を認識ながら自律的に目的地まで運転を操作します。これは、最終目標の「完全自動運転」の姿ですが、その前段階の運転を支援するレベルを含めて、広い範囲で自動運転という名称は使われています。
完全自動運転が実現されると、多くのメリットがあります。
・交通事故の減少
交通事故の主な原因は、人為的なミスです。センサーとコンピューターで判断する方が圧倒的にミスは減少し、交通事故が減少します。
・渋滞の解消
最適な走行経路の選択や適切な車間や速度を維持できるため、渋滞が緩和されます。
・運転に対する精神的負荷の解消と時間の有効活用
運転からの解放による肉体的・精神的疲労の軽減や、移動中に会話や読書など自由な時間が増えます。
・迷惑運転の減少
悪質な暴走運転や、社会問題となっている煽り運転に悩まされることがなくなります。
・その他
ドライバーの運転技術によらないので、高速走行化による時間短縮、ハンドルや変速レバーがなくなることによる広い車室空間の確保、カーシェアリングが普及すれば自車購入の金銭負担の軽減
自動運転のデメリット
メリットに比べればデメリットは少ないですが、以下のことが考えられます。
・システムのハッキングによるトラブルや事故発生のリスク
・ドライバーの運転技術の低下による自力運転時の事故発生のリスク
・カーシェアリングが進めば車の数が激減するため、自動車関連の就業人口の減少やタクシー運転手の減少
自動運転実用化に向けた課題
技術課題とは別に、自動運転実現のためには以下のルールと環境整備が必要です。
・国際的な基準づくり
自動運転の将来像の共有と国際ルール(基準や標準化)づくり
・自動運転を想定してない現行法規の改正
道路交通法の改正によって、2020年4月に自動運転レベル3の解禁、2023年4月には自動運転レベル4の自動運転が解禁となりましたが、さらに自動運転を展開しやすいようにする法規の整備
・事故時の責任問題
・情報セキュリティとハッキングへの対策
自動運転のレベル分け
完全自動運転に至る技術レベルを6段階に分けて、レベルを規定しています。
・レベル0(自動運転技術なし)
自動運転技術を採用せず、すべての操作をドライバーが行います。
・レベル1(運転支援)
加速(アクセル)、操舵(ステアリング)、制動(ブレーキ)のうち、いずれかひとつをシステムが支援します。
・レベル2(部分運転自動化)
加速、操舵、制動のうち、複数をシステムが支援します。
・レベル3(条件付き運転自動化)
限定された条件(高速道路や過疎地域など)下で、すべての操作をシステムが行います。ただし、システムの継続が困難な緊急時は、ドライバーが操作を行わなければいけません。
・レベル4(高度自動運転)
限定された条件(高速道路や過疎地域など)下で、すべてをシステムが行います。ドライバーが全く関与しません。
・レベル5(完全自動運転)
いかなる状況でもシステムが操作する、実質的な完全自動運転です。
本章では、運転支援技術や自動運転技術、自動運転の現況と今後の展開について、詳細に解説します。
■NCAP予防安全性能評価とは
NCAPは、新しく発売された車を衝突させて、乗員の安全性を評価する自動車衝突試験/評価プログラムです。2014年から従来の衝突安全評価に加えて、予防安全性能の評価が追加されました。
運転支援や自動運転にもつながるNCAPの予防安全性能の評価について、解説していきます。
NCAP(New Car Assessment Program)
NCAPは、市場投入された新車を衝突させ、衝突時の乗員の安全性を評価し、結果を点数にして公表するプログラムです。法規ではありませんが、国ごとに独自の方法で実施されています。
日本ではJ(Japan)NCAPと呼ばれ、国土交通省と自動車事故対策機構(NASVA)によって評価され、「自動車アセスメント」結果として毎年2回公表されています。
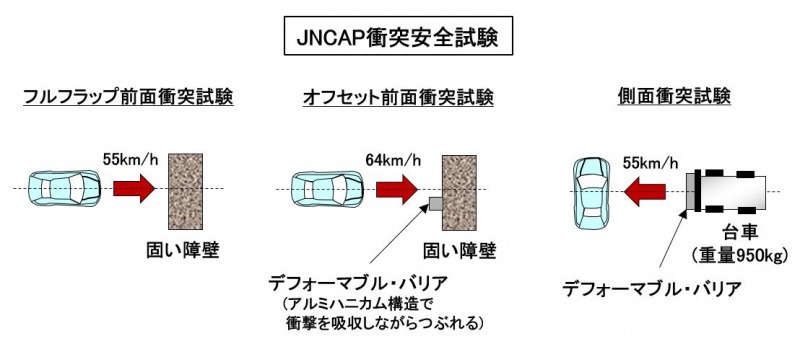
従来のJNCAPは、6パターンの衝突安全試験で構成されていました。
・フルフラップ前面衝突試験
車速55km/hで車の前面全体を壁にぶつける正面衝突
・オフセット前面衝突試験
車の前面の一部(運転席側の4/10)を、車速64km/hで壁に衝突
・側面衝突試験
静止車の運転席側の側面に台車(重量950kg)を車速55km/hで衝突
・歩行者頭部保護性能試験
ボンネットに頭部を模したダミー(インパクター)を車速35km/hでたたきつけ、障害値を計測
・後面衝突頸部保護性能試験
停車中に後ろから衝突された状況を再現、乗員の頸部に受ける衝撃の度合いを計測
・ブレーキ性能試験
車速100km/hで急制動、停止するまでの距離を計測(乾燥路面と濡れた路面)
JNCAPの予防安全性能評価
2014年から上記の衝突安全評価に、以下の予防安全評価の試験が追加されました。
・対車両と対歩行者の緊急自動(被害軽減)ブレーキ
・車線はみ出し警報
・後方視界情報(バックビューモニター)
自動緊急ブレーキシステム
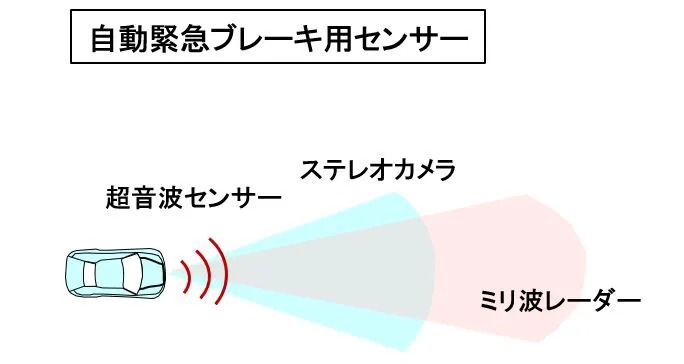
予防安全の基本は、危険を察知してブレーキをかける自動緊急ブレーキ(AEB)システムです。2021年12月から国産新型車のAEB搭載の義務化が施行されていますが、ブレーキ性能は、障害物を検知するセンシング技術に大きく依存します。採用されているセンサーは、大きく分けて3種類あります。
・ステレオカメラ方式
2つのカメラを使用するステレオカメラ方式は、障害物の形状(人間、自転車など)が認識でき、ある程度の角度で中距離(100m程度)まで検知できます。逆光や雨、霧などの悪天候によって視界が悪くなると、機能が低下するか、システムが機能しなくなります。代表的なのは、スバルの「EyeSight(アイサイト)」です。
・赤外線レーザー方式
指向性の強い赤外線レーザーを照射して、反射波で検知する方法です。検知距離は30m程度と短く、低速30km/h以下までしか検知できません。コストが安く、軽自動車などに採用例が多いです。VW「スマートエマージェンシーブレーキ」、ダイハツ「スマートアシスト」などで採用されています。
・ミリ波レーダー方式
カメラ方式より遠方(150~200m)まで検知でき、天候に左右されることなく高速でも信頼性が高いため、高速走行頻度の高い欧州車の多くが採用しています。
一方で、形やサイズなどの詳細な識別はできず、歩行者のように電波を吸収しやすい対象物は検知できません。システム全体が大きく、コストは3種の中で最も高くなります。
三菱「衝突被害軽減ブレーキ」、マツダ「スマートブレーキサポート」、ボルボ「ヒューマンセーフティ」などで採用されています。
実際には、あらゆる状況で精度良く対応するために、これらの3種を複数組み合わせた「複合型」の採用例が多いです。トヨタの「Safety C」は単眼カメラ+レーザーレーダー、「Safety P」は単眼カメラ+ミリ波レーダーの複合型です。
今や予防安全技術が搭載されてない車は売れないと言われるほど、一般ユーザーにその重要性が浸透しています。
特に、高齢化ドライバーが多い日本では、「ぶつかっても安全な車」から、「ぶつからない車」へと要求が変わっています。
■自動運転のレベルとは
自動運転は、システムが全面的に運転操作する完全自動運転に至るまでの技術レベルに応じて、6段階にレベル分けされています。
自動運転レベル0~レベル5までの定義と、実用化例について解説していきます。
自動運転のレベル分け
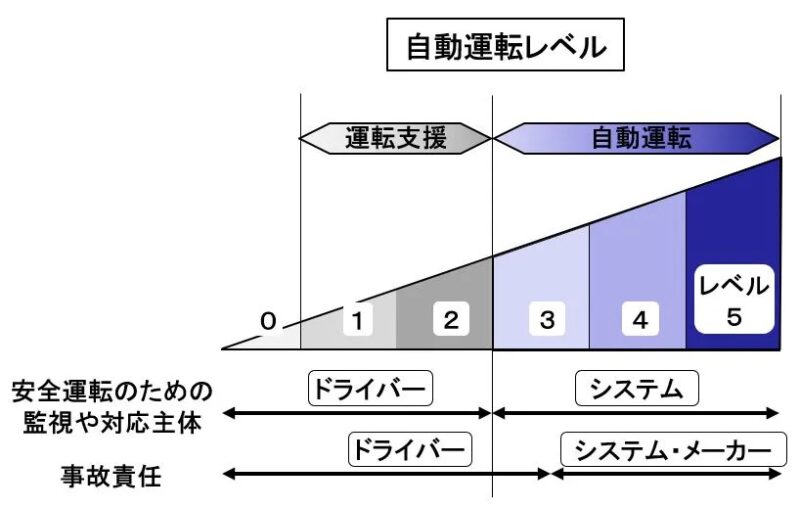
自動運転技術が全く採用されていない自動運転レベル0から、システムが周囲の環境を認識ながら自律的に目的地まで操作する自動運転レベル5まで、6段階にレベル分けされています。このレベル分けは、システムがどこまで判断し操作するかを段階的に示しており、SAE(米国自動車技術会)の定義付けをベースにしています。
自動運転レベル
・自動運転レベル0(運転自動化なし)
自動運転機能が全く採用されていない、ドライバーがすべての運転操作を行います。
・自動運転レベル1(運転支援)
加速(アクセル)、操舵(ステアリング)、制動(ブレーキ)のうち、いずれかひとつをシステムが支援します。障害物を検知して自動でブレーキをかけるAEB(自動緊急ブレーキ)や、車線を逸脱するとステアリングを補正するLKAS(レーンキープアシスト)、先行車との距離を一定に保つACC(追従機能付クルーズ制御)、駐車支援などが単独で機能する技術レベルです。運転支援というより安全のための装備で、最近の車には普通に採用されています。
・自動運転レベル2(部分運転自動化)
加速、操舵、制動のうち、複数をシステムが支援します。例えば、渋滞時にステアリングとブレーキ操作しなくても先行車に追従する渋滞追従機能、方向指示器の操作で自動的に車線変更を行う自動車線変更、先行車との車間距離を保つACCと車線中央をキープするLKASを組み合わせた車線中央維持などのレベル2では、高速道路などをストレスなく安全に走行できます。
・自動運転レベル3(条件付き運転自動化)
限定された条件下で、すべての操作をシステムが行います。ただし緊急時は、ドライバーが操作を引き継がなければいけません。限定された条件とは、交通量が少ないとか、環境条件が良いとか、運転しやすい条件が整っている状況を意味します。自動運転中の事故はシステム(メーカー)責任、ドライバー運転中は当然ながらドライバー責任です。
・自動運転レベル4(高度自動運転)
限定された条件下で、すべての操作をシステムが行います。レベル3との違いは、ドライバーが全く関与しないことです。言い換えると、自動運転しやすい条件が整わない限り走行できません。ドライバーが引き継いだ瞬間に、レベル3になります。
・自動運転レベル5(完全自動運転)
いかなる状況でもドライバーを必要としない、すべてをシステムが操作する、実質的な完全自動運転、無人運転です。
■運転支援技術とは
自動運転に向けてベースとなるのが、運転支援技術です。すでに2021年12月から国産新型車については搭載が義務化されている衝突被害軽減ブレーキ(AEB)、追従機能付クルーズコントロール(ACC)、車線維持支援(LKAS)などの運転支援技術を取り上げて、解説していきます。
運転支援技術
自動運転のレベル分けでは、レベル2までが運転支援、レベル3以上が自動運転に分けられます。部分運転自動化のレベル2は、加速(アクセル)、操舵(ステアリング)、制動(ブレーキ)のうち複数をシステムが支援します。一方、条件付き運転自動化のレベル3は、限定された条件ですべてをシステムが支援します。
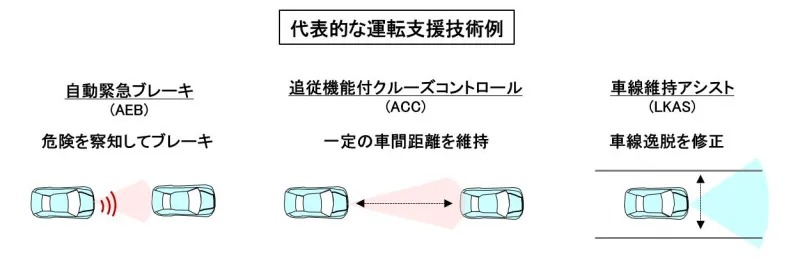
以下に、代表的な加速、操舵、制動に関わる運転支援技術について概説します。
自動緊急ブレーキ
予防安全の基本は、危険を察知してブレーキをかける、自動緊急ブレーキ(AEB:Autonomous Emergency Braking)です。前方の車両や人、障害物を検知して、衝突回避あるいは被害軽減のために自動的にブレーキを制御します。
その必要性から、国産新型車については2021年12月から、自動緊急ブレーキの搭載が義務化されました。継続生産車は2025年12月から、また輸入新型車が2024年7月、輸入継続生産車は2026年7月から搭載が義務化される予定です。
障害物を検知する方式(センサー)は、大きく分けて3種類あります。
・ステレオカメラ方式
障害物の形状(人間、自転車など)が認識でき、中距離(100m程度)まで検知できます。逆光や雨、霧などの悪天候によって、機能が低下する欠点があります。
・赤外線レーザー方式
検知距離は30m程度と短く、低速30km/h以下までしか検知できません。コストが安く、軽自動車などに採用例が多いです。
・ミリ波レーダー方式
カメラ方式より遠方(150~200m)まで検知でき、天候に左右されない利点があります。一方で、形やサイズなどの詳細な識別ができず、コストは最も高いです。
追従機能付クルーズコントロール
追従機能付クルーズコントロール(ACC:Adaptive Cruise Control)は、ブレーキに加えてアクセルも操作して、前方車両を検知しながら一定車間距離を維持しつつ、定速走行を行います。高速道路や自動車専用道路の使用が前提なので、前方車両のセンシングはステレオカメラか、ミリ波レーダーが使われます。進化版として、渋滞路で前方車両の停止、発進にも追従する、渋滞追従機能付ACCもあります。
車線維持支援
車線維持支援(LKAS:Lane Keep Assist System)は、高速道路などで、車線の中央付近を走行するようにステアリング操作を支援し、安全かつドライバーの運転負荷を軽減します。車線をはみ出しそうになると、警告を発して(多くは、ハンドルの振動)ステアリング操作の支援を行います。車線を検知するため、カメラの搭載が必須です。
LKASの前段階の技術として、車線を逸脱しそうなると警報のみを行う車線逸脱警報システム(LDW:Lane Departure Warning)があります。
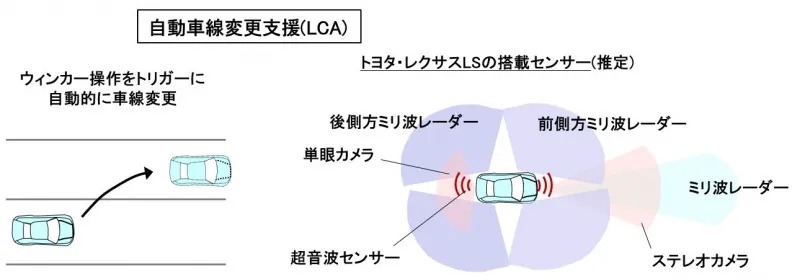
自動車線変更支援(LCA:Lane Change Assist)
自動車線変更支援(LCA:Lane Change Assist)は、高速道路や自動車専用道路を走行中、ウィンカーの操作をトリガーにして車線変更を行います。車線変更のためのステアリング、アクセル・ブレーキ、周辺の車両監視の支援を行います。
トヨタのレクサスLSのLCAでは、一般的なミリ波レーダーとステレオカメラの組み合わせに加えて、周辺の走行車両を監視する前側方レーダーや後側方レーダーを装備しています。
その他の運転支援技術
近距離センサーである超音波センサーや、カメラを活用した自動駐車システム、AT誤発進抑制制御が実用化されています。
運転支援のベースとなる自動緊急ブレーキ(AEB)や追従機能付クルーズコントロール(ACC)、車線維持支援(LKAS)は、すでに多くの車が採用し、自動車線変更支援(LCA)も多くのメーカーが実用化を進めています。
ハンズフリーの実用化
運転支援のなかでも高度な技術として位置づけられているのが、ハンズフリー(手放し運転)です。ハンズフリーは、法的に曖昧な部分がありましたが、ACC(アダプテッドクルーズコントロール)やLCA(レーンキープアシスト)といった高度な制御技術のもとで、一定条件下に限って運転中にハンドルから手を離すことが可能になりました。ただし、あくまで運転支援機能のため、ドライバーはハンドルから手を離しても即座にハンドルを握れる状態とし、従来の運転と同様に周囲を常時監視し続ける必要があります。
レベル2に相当しますが、レベル2と区別するために、レベル2.5とか、レベル2+と表現されることもあります。トヨタの「Advanced Drive」や日産の「パイロット2.0」、ホンダ「HONDA SENSING Elite」、スバル「アイサイトX」で実用化されています。
自動運転レベル3の登場
運転支援でなく、世界初の自動運転レベル3を実現したホンダ「レジェンド」が2021年3月に発売されました。自動運転「Traffic Jam Pilot」システムでは、一定条件下ですべての操作をシステムが行い、ハンズオフとアイズオフ(ドライバーが進行方向から目を離すこと、ただしレジェンドではスマホ操作は禁止)も可能。例えば、高速道路を30km/h以下で走行中に、ハンズオフだけでなく、アイズオフも可能で、ハンズオフで車線変更もできます。
世界初のレベル3ということで大きな注目を集めましたが、限定100台の法人リースでの販売のため、現在受付は終了しています。
■完全自動運転技術とは
完全自動運転では、ドライバーに代わってシステムが周囲の環境を認識ながら、自律的に目的地まで運転を操作します。
完全自動運転の実現に必要な機能と先進技術について、解説していきます。
完全自動運転に必要な機能
自動運転では、認知、判断、操作をドライバーに代わって、システム(制御プログラム)が行います。
自動運転が機能するためには、各種センサーを使った高度な認知技術や「AI(Artificial Intelligence人工知能)」を活用した適切な判断と走行プランニング、機敏な操作による車両の統合制御、通信を利用したコネクティッド技術などが必要です。
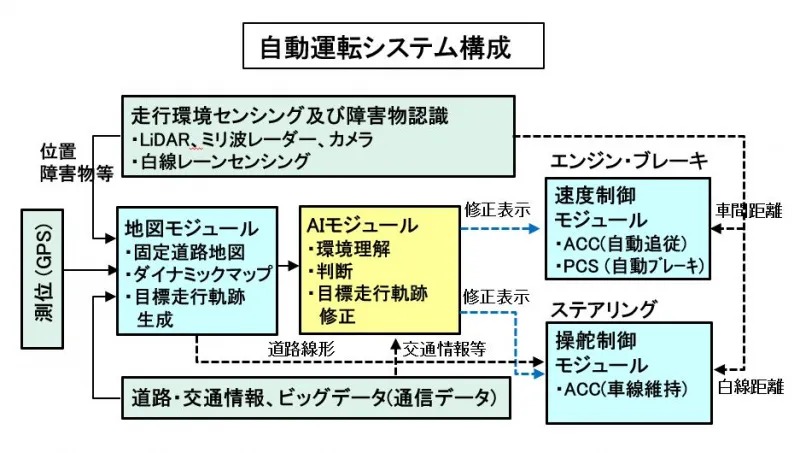
高度な認知技術
車の現在位置を正確に特定し、周囲の状況を先読みするために、各種センサーやGPS(全地球測位システム)、高精度な「ダイナミックマップ」、通信技術によって得られる情報が使われます。
道路上の他車や周辺の障害物、自転車、人の位置や動きを認識するためには、さまざまなセンサーが必要です。ステレオカメラ、赤外線レーザー、超音波センサー、ミリ波レーダー、「LiDAR(ライダー)」が使われます。
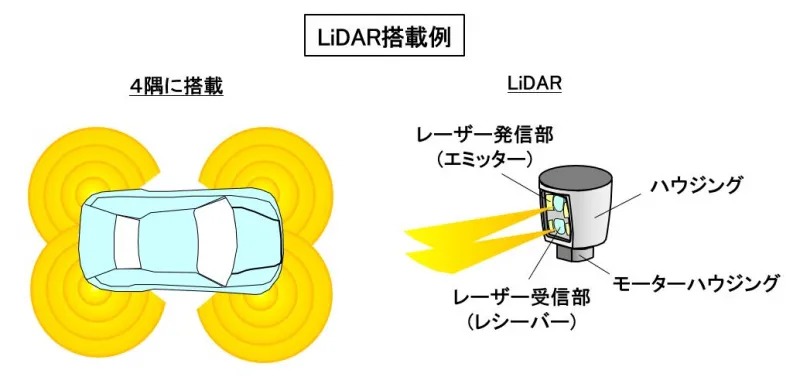
LiDARは、「Laser Imaging Detection and Ranging(レーザー画像検出と測距)」の略称です。
レーザー光をパルス状に照射し、対象物から反射して跳ね返ってくる時間から、距離や位置、形状まで計測できるセンサーです。レーザーを円形かつ上下にスイープすることで、全周囲(または広範囲)の障害物を3次元計測できます。また、短い波長の赤外線を使うため、反射率の低い、小さな対象物まで正確に検出できます。
今後、一般道で完全自動運転を実現するためには、LiDARの活用は必須です。
ダイナミックマップは、静的な高精度3次元地図に、渋滞情報や事故による通行規制など、刻々と変化するリアルタイムの道路情報を更新する動的な地図情報を組み合わせたデジタル地図です。
適切な判断と走行プランニング
AIは、各種センサーで検知した物体が何かを識別し、車をどのように操作をするかを判断します。さらに、周辺の状況から歩行者の飛び出しや他車の割込みなどを予測して、例えばシステムがブレーキをかける、急停止することを指示します。
AIは、ディープラーニング(深層学習)という手法によって、あらゆる物体のあらゆる事象のデータを蓄積して解析することによって、センシング(検知器や感知器、測定器などで測定対象の定量的な情報を取得する技術)によって得られた情報から、何が何をしているかを認識し、次に何が起こるかを予測して次の操作を指示します。
また、どの経路や車線を走行すべきかの走行ルートの選択、走行プランニングもAIが判断します。
コネクティッド技術
完全自動運転を実現するためには、車の技術だけでなく、外部と通信ネットワークでつながることが必須です。
車の走行状況がクラウド上で収集され、混雑や事故を避けた最適な走行経路を選択したり、故障や事故時の自動通報などができます。また車-車間通信や路-車間通信によって、センサーでは検知できない不慮の事故や見通しの悪い交差点での安全を確保します。
機敏な操作
システムが、実際に車を動かすためには、エンジンやステアリング、ブレーキなどを正確かつ機敏に操作する必要があります。すでに、車両の統合制御はかなり高いレベルに達しており、機構制御は完成の域に近い状況です。
レスポンス良く制御できる電動化技術が、自動運転の発展に大きく貢献しています。
自動運転の開発領域は非常に広いので、多くの自動車メーカーは、IT企業や半導体企業、AI研究機関などと、協業/競争しながら開発を推進しています。
■LiDARとは
現在、各メーカーが目標としている条件付き自動運転レベル3以上では、距離や位置、形状をより高い精度で計測するために、LiDARの採用が必須です。
自動運転車用として注目されているLiDARの機能と必要性について、紹介していきます。
LiDAR
LiDAR(ライダー)は、「Laser Imaging Detection and Ranging(レーザー画像検出と測距)」の略称です。
レーザー光をパルス状に照射し、対象物から反射して跳ね返ってくる時間から、距離や位置、形状まで計測できるセンサーです。レーザーを円形かつ上下にスイープすることで、全周囲(または広範囲)の障害物を3次元計測できます。また短い波長の赤外線を使うため、反射率の低い、小さな対象物まで正確に検出できます。
LiDARの必要性
高速道路であれば、車線を維持するLKAS(車線維持システム)や、自動で車線変更を行うLCS(車線変更システム)などの部分自動運転レベル2は、「ミリ波レーダー+カメラ」の組み合わせで対応できます。
一方で、一般路での自動運転を見据えると、より精度の高いLiDARの採用が必須です。必要な理由は、以下の通りです。
・自車位置を特定するためのGPS情報の誤差(10m程度)は、障害物がなくスムーズに流れる高速道路では問題となりません。しかし、一般路の複雑な交通状況では、GPSの誤差は許容できず、また障害物によってGPS信号が受信できない頻度も増えます。
・ミリ波レーダーやカメラでは、周囲との正確な距離が把握できません。一般道路では、複雑な道路や狭い路地などを走行する頻度が高まるので、数cmの精度で距離が計測できるLiDARが必要です。
現在提案されている完全自動運転車
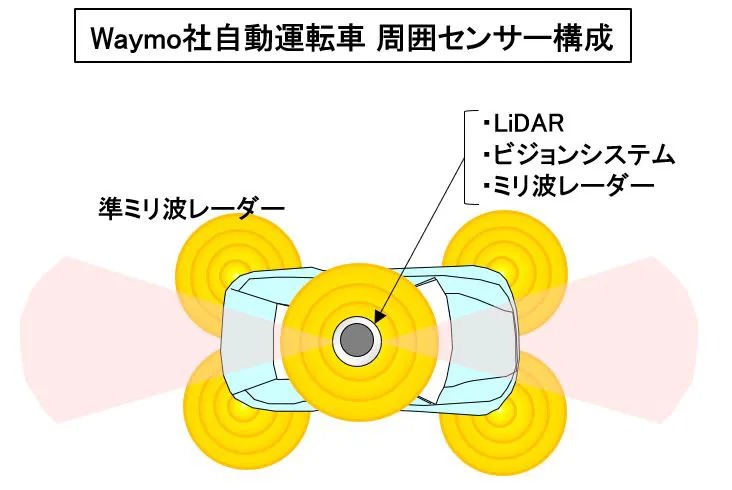
・Waymo(Googleの自動運転開発子会社)
ルーフの小型ドームにLiDARとビジョンシステム、ミリ波レーダーを格納し、車の左右前後4隅には準ミリ波(短距離)レーダーを装備しています。小型ドームのLiDARで全方位を3次元で把握します。ビジョンシステムは、ダイナミックレンジの広いカメラの集合体で周囲360度を監視し、さらにミリ波レーダーで遠方の障害物を検出します。また、車の4隅の準ミリ波レーダーは、車の近くの人や自転車などを把握します。
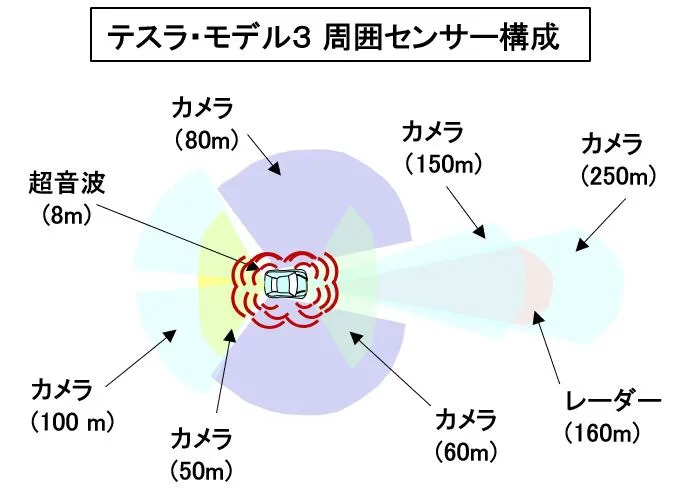
・テスラ
市販化されているモデル3とモデルXの「オートパイロット」は、ハードは完全自動運転を視野に入れた装備となっています。視認距離が50m~250mまでの8台のサラウンドカメラと前方ミリ波レーダー1基、超音波センサー12基を装備しています。
法的な制約がなくなれば、制御ソフトをアップグレードして、自動運転のレベルをアップできると公表しています。LiDARを使わずに、周囲に多数のカメラを搭載して対応していますが、LiDARを使わずに完全自動運転まで対応できるかについては、疑問を呈する人もいます。
テスラの事故が残した課題
2018年3月に発生したテスラ・モデルXの死亡事故は、「オートパイロット(半自動運転)」で高速道路を走行中に、ドライバーがシステムの警告を無視し続け、ハンドルを握らず操作しなかったため発生したと、テスラ側は主張しています。
これを、単純に半自動運転時のドライバーの責任である、ヒューマンエラーと片づけてよいのか、システムがさらにカバーする必要があるのかなど、まだ議論の余地があります。
2012年にスタートしたGoogle社の自動運転実験車のルーフに搭載していたLiDARは、数100万円でした。その後も数10万円レベルで、さらに他のセンサーも必要なことから、自動運転車の価格は必然的に高価になります。
■日産プロパイロットとは
多くのメーカーが自動運転レベル2の車を商品化していますが、その中でもいち早く自動運転を意識して「半自動運転」をアピールしたのが、2016年の日産・セレナに搭載した「プロパイロット」です。
プロパイロットの機能や特徴について、解説していきます。
プロパイロット
日産のプロパイロットは、高速道路で単一車線を維持しながら先行車に追従することによって、渋滞時や高速巡行時にドライバーの運転負荷を軽減します。自動運動レベル2に相当し、信号のない高速道路走行や自動車専用道路に限って、アクセルとブレーキ、ステアリングを自動的に制御します。
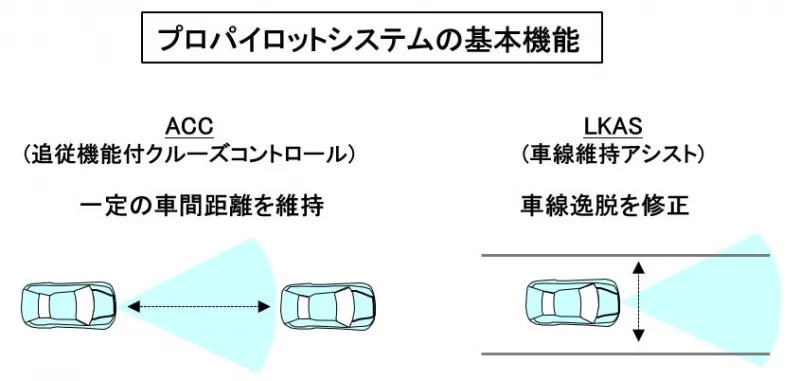
プロパイロットは、基本的に2つの機能から成ります。
・ACC(追従機能付クルーズコントロール)
車速30~100km/hの範囲で、先行車との車間距離を維持する追従走行を行います。先行車が停止すると自車も停止、先行車が3秒以内に再発進すれば、自動発進して追従を続けます。停止して3秒以上経過した場合は、アクセルを踏むか、ステアリングにあるスイッチを押すことによって再発進し、追従制御を継続します。
・LKAS(車線維持支援システム)
走行レーンの白線を認識して車線中央を走行するように、ステアリングの操作を支援します。ステアリングの支援は、上記のACCが作動しているとき、レーンの白線が認識できているとき、先行車を検知しているとき、ドライバーがハンドルを握っているときに限られます。
プロパイロットの構成
一般にACCを機能させるには、「カメラ+ミリ波レーダー」や「ステレオカメラ」を使用しますが、プロパイロットでは高性能の単眼カメラのみで先行車や歩行者を認識します。
これは、画像処理に優れているモービルアイ社(イスラエル)の高度画像認識技術を採用しているからです。
ステアリングへの介入は、手を添えている程度の軽さでも分かる強さに調整しています。また、ドライバーが手動に切り替えたいと意識して少しでもハンドルを操作すると、すぐに制御は解除されます。
現在の法規では、プロパイロット作動中でも車速10km/h以上では手放し運転は禁止されています。セレナでは、手放し運転すると5秒後には警報が鳴り、10秒後には自動運転が解除されるように設定しています。
状況によっては作動に限界も
2016年11月、日産の販売店でセレナの試乗に来たお客さんに、販売員が自動停止する車だからブレーキを踏まないように指示しため、交差点で信号待ちの車に追突するという事故が発生しました。
事故当時は、夜間で雨降りという、カメラが先行車を認知しづらい悪条件でした。自動運転技術は万能でないという、意識付けが重要であることの一例です。
進化した日産プロパイロット
日産は、2019年に進化した「プロパイロット2.0」を搭載した新型「スカイライン」の発売を開始、その後「アリア」と「セレナ」にも搭載されました。
高速道路のナビ連動ルート走行と同一車線におけるハンズオフ機能の同時採用は世界初で、カメラ7個、レーダー5個、ソナー12個で360度センシングを実現。ナビで目的地を設定すると、高速道路の走行車線を進行中に、一定の条件を満たせばハンズオフでの自動運転システムが使えます。ハンズオフは、自動車専用道路のみで使用可能で、また使用するためには多くの条件を満たす必要があります。
自動運転レベル3以上に向けた動き
自動運転レベル3は、ホンダのレジェンドに続いて、メルセデス・ベンツの「ドライブパイロット」も市販化されました。
ハンズフリーが可能なレベル2.5については、ホンダ、トヨタ、日産、スバルが実用化しており、さらに高度な条件付きの自動運転レベル3以上へのレベルアップを、主要な自動車メーカーは目指しています。
■自動駐車とは
自動運転のひとつである自動駐車は、すでに実用化されている駐車支援から、現在は完全自動駐車に向けて開発が進んでいます。
自動駐車の開発状況と最新の技術動向について、解説していきます。
自動駐車
駐車時にステアリング操作を支援する駐車支援機能は、ドライバーのストレスを軽減し、事故を減らす効果があります。さらに、狭い場所でも駐車できるので駐車場不足の解消にも貢献することから、自動運転とともに積極的に開発が進められています。
世界で初めて駐車支援を実用化したのは、2003年のトヨタ駐車支援「インテリジェントアシスト」です。
車をバックする位置に止めて、シフトを[R]に入れて操作ボタンを押せば、自動でステアリング操作をしてくれます。アクセルとブレーキの操作は、ドライバーが行いますが、操作の負担はかなり軽減できます。日産やホンダなども同様のシステムを市販化しています。
自動駐車の仕組み
初期のステアリング操作だけの支援から、現在はブレーキやアクセル、シフトも操作対象とする自動駐車に進化しています。
自動駐車のために必要なセンサーとしては、超音波センサーとカメラがあります。駐車のスペースを検知するためには超音波センサーが必要で、夜間や悪天候でも障害物を検知でき、距離が認識できます。白線や駐車枠を認識し、移動物体を検知するためにはカメラが必要で、分解能が高く状況を画像で表現できる特徴があります。
高度な駐車機能を実現するため、一般には超音波センサーと全周囲カメラの両者を組み合わせて使います。
日産・リーフのプロパイロット・パーキング
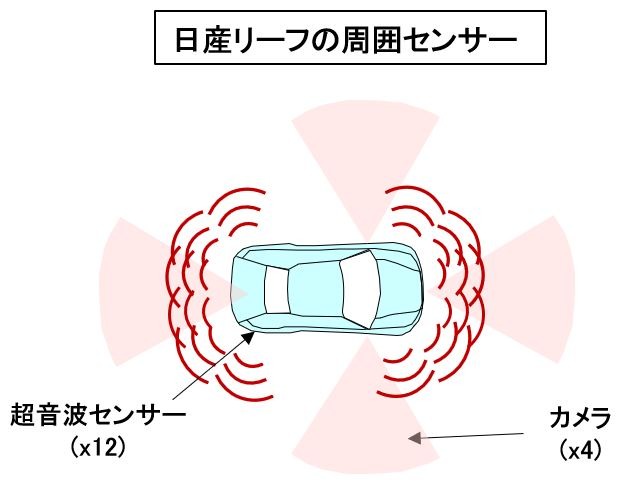
2017年発売の新型リーフの自動駐車システム「プロパイロット・パーキング」は、ステアリングとアクセル、ブレーキ、シフトを自動制御する先進の自動駐車システムです。並列・縦列駐車、前向き駐車、後向き駐車に対応可能です。
4つの高性能カメラのリアルタイム画像処理と、車両周辺12基の超音波センサーによって、周辺状況を認識しながら自動駐車を実現します。障害物や歩行者が接近すると、自動的に停止し安全を確保します。
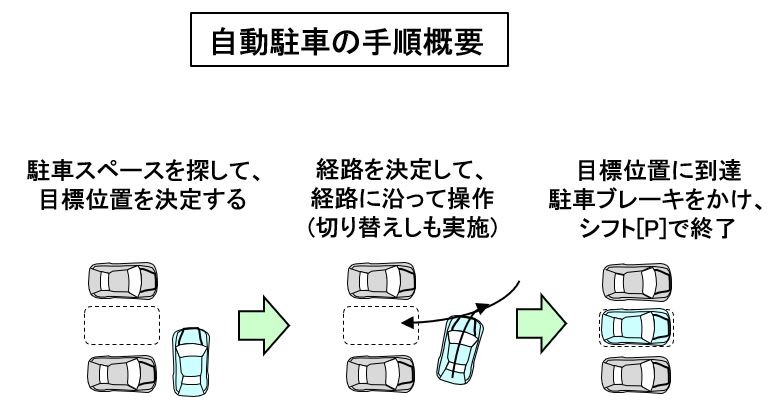
操作手順としては、まず起動スイッチを押して車が駐車可能なスペースを検出します。あとは、パーキングスイッチを駐車完了まで押し続ける(離すと車両は停止)だけです。さらに駐車が完了すると、自動的に電動パーキングブレーキを作動させてシフトを「P(パーキング)」に入れます。
ダイムラー・Sクラスのリモート・パーキングアシスト
2017年に部分改良したダイムラーのSクラスは、縦列駐車や並列駐車が可能なリモート駐車機能を搭載しました。車両周辺に装着した12基の超音波センサーによって検出した駐車スペースに、車外のスマートフォンを使って遠隔操作で自動駐車できます。
操作手順は、まず起動ボタンを押して車が駐車可能なスペースを検出します。駐車スペースや駐車形態を選択して、駐車機能を開始させます。ドライバーは、シフトをパーキングに入れて降車し、車外からスマホのアプリでリモート駐車を行います。
車両は、ドライバーの管理下にあることが大前提なので、スマホの画面で操作している間だけ動くようになっており、また車から3m以内にいる場合に機能するようになっています。
自動駐車の先にある技術
自動駐車のその先にある注目の技術が、「自動バレーパーキング」です。ホテルやショッピングモールなどの大駐車場で、ドライバーが駐車場まで行かずに降車し、車が自ら駐車場内を走行して自動で駐車するシステムです。
自動運転は特に必要ないですが、駐車操作は面倒なので自動駐車はぜひ必要という人は多いです。自動運転による走行よりも、技術的、法的なハードルが低く、ニーズの高い自動駐車の方が先行的に普及するのではないでしょうか。
■AT誤発信抑制制御とは
自動運転とは直接関係ありませんが、安全のための運転支援技術として、AT誤発進抑制制御があります。AT車の誤発進による事故は、AT車の新車比率が95%を超える日本では、大きな社会問題になっています。
すでに多くの車種で採用しているAT誤発進抑制制御について、解説していきます。
AT誤発進
車側の不具合でないAT誤発進のほとんどは、アクセルとブレーキを踏み間違えるドライバーのミスによる事故です。ブレーキを踏むつもりで間違ってアクセルを踏んで、急発進・急加速することによって起こる事故です。
AT誤発進事故は、ATの歴史とともに発生しており、特に新車のAT車比率が95%を超える高齢者社会の日本では、大きな社会問題となっています。
AT誤発進対策
かつては事故のたびにメーカーが責任を問われることも多く、メーカーはアクセルペダルとブレーキペダルの配置の適正化やシフトロック機構(ブレーキを踏んでないとシフトレバーがPまたはNから動かない)などで対応してきましたが、効果は限定的でした。
最近になって、運転支援技術の自動緊急ブレーキ(AEB)の普及とともに、周辺検知センサーを用いて誤発進を抑制するシステムが普及し始めました。
運転支援技術の自動緊急ブレーキ(AEB)が一般的な技術となって、周辺検知センサーを用いて誤発進を抑制するシステムが普及しています。
AT誤発進抑制制御
すでに、すべてのメーカーがAT誤発進抑制制御を採用しています。各社システムの名称は異なります。が、一般的には以下のように作動します。
駐車操作など停止、または車速約10km/h以下の低速走行時、進行方向(約4m範囲内)に建物や壁などの障害物がある場合にアクセルを一定以上強く踏み込んだとき、警報とともに自動的にエンジンの出力を抑え、急発進や急加速を抑制します。さらに障害物に接近すると、ブレーキが作動します。
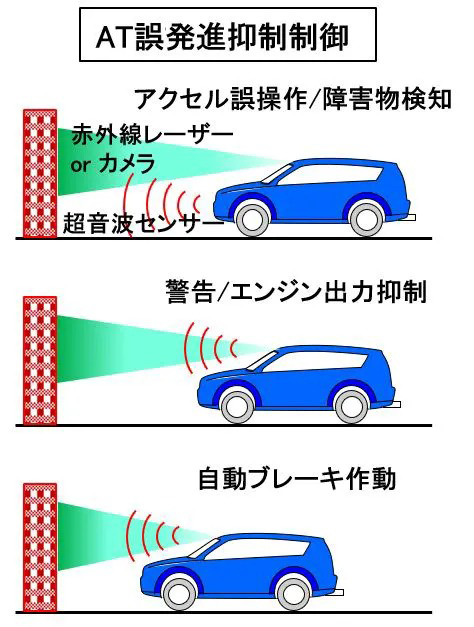
障害物の検知方法は、メーカーによって異なり、赤外線レーザーやステレオカメラ、超音波センサー、ソナーなどが使われています。前進のみ対応と、前後進に対応できるシステムがあります。
・トヨタ「インテリジェントクリアランスソナー」
ソナーを使って前方・後方の障害物を検知
・日産「踏み間違い衝突防止アシスト」
赤外線レーザーを使って前方障害物を検知、あるいはソナーで前方・後方の障害物を検知
・ホンダ「誤発進抑制機能」
赤外線レーザーで前方障害物を検知
・スバル「AT誤発進抑制制御」
テレオカメラで障害物と人を検知し、後方についてはアクセル踏み込み量で誤後進を検知
・マツダ「AT誤発進制御」
赤外線レーザーで前方障害物を検知し、超音波センサーで後方障害物を検知
AT誤発進抑制制御の課題
採用している各センサーの検知能力には、限界があります。
赤外線レーザーや超音波センサーは、レーザーや音波が反射しにくい材質の障害物や、網目状のフェンスなどには機能しません。また赤外線レーザーやカメラは、夜間や雨天などの悪天候、悪条件では性能が低下します。超音波センサーは3m程度までの近距離しか検知できない弱点があります。
高齢者に限ったことではありませんが、相変わらず踏み間違いでコンビニや病院に突っ込んだという事故を耳にします。AT誤発進抑制制御の作動には限界があることから、あくまで補助的な抑制であって、完全には防止でないことを認識しておくことが重要です。
(Mr.ソラン)
クリッカー自動車用語辞典 https://clicccar.com/glossary/