
目次
エンジンの配置を含めて、エンジンの駆動力をタイヤに伝える駆動方式には、さまざまなタイプがあります。目標とする走り、走行性能によって、「FF」や「FR」、「MR」、「RR」、「4WD」方式などの駆動方式が選択されます。
それぞれの駆動方式の特徴とメリット・デメリットについて、解説していきます。
■車の駆動方式とは
駆動方式の種類
駆動方式は、駆動輪の位置によって、前輪駆動と後輪駆動、4輪駆動に分けられます。またエンジンの位置は、フロントエンジン、ミッドシップエンジン、リアエンジンに分けられます。
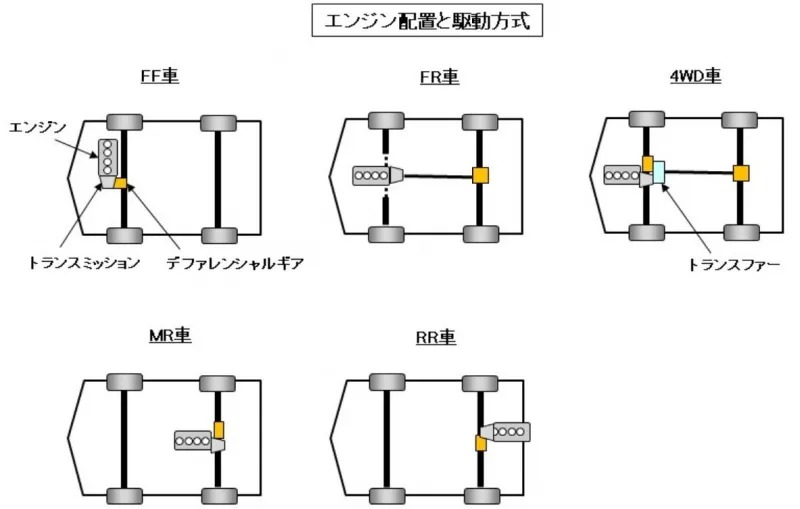
駆動方式とエンジン配置の組み合わせで、次の5方式に分類されます。
FF(フロントエンジン・フロントドライブ)方式
FR(フロントエンジン・リアドライブ)方式
MR(ミッドシップエンジン・リアドライブ)方式
RR(リアエンジン・リアドライブ)方式
4WD(4ホイールドライブ)方式
FF(フロントエンジン・フロントドライブ)方式
エンジンをフロントに配置して前輪駆動するFF方式は、コンパクトカーやミニバンだけでなく、最近はSUVにも採用されている主流の駆動方式です。
フロントにエンジンと駆動輪、操舵装置があるため、重量が集中します。フロントタイヤのグリップ力が強く、直進安定性に優れ、また雪路など滑りやすい路面でも比較的安定した走行ができます。プロペラシャフトがないため、室内空間が広くとれるメリットもあります。
一方で、すべてフロントに搭載するため、構造が複雑です。加速時には、後輪に荷重がかかり前輪のグリップ力が低下するため、発進加速性が劣るという弱点があります。したがって、スポーツタイプの車には向きません。
FR(フロントエンジン・リアドライブ)方式
フロントにエンジンを配置し、プロペラシャフトを介して後輪で駆動するFR方式は、比較的大型車や高級車で採用されています。操舵はフロントタイヤ、駆動はリアタイヤと役割が前後輪で分担されているので、高出力エンジンに対応できます。
プロペラシャフトがあるため、室内居住性は悪く、またFF車よりも部品点数が多いため、コストが高くなります。滑りやすい悪路では、後輪がスリップしやすいので注意が必要です。
MR(ミッドシップエンジン・リアドライブ)方式
後席の下にエンジンを搭載するので、通常は後席のない2シーターになるため、スポーツカーで採用されています。操舵はフロントタイヤ、駆動はリアタイヤと役割が前後輪で分担されているので効率的で、高出力エンジンに対応できます。車の中央に重心があるため、運動性能や旋回性能に優れています。
車内が狭く、荷室スペースの確保も厳しいです。オーバーステアの傾向が強く、中上級の運転技術が必要です。
RR(リアエンジン・リアドライブ)方式
ポルシェの一部のみ採用されていますが、日本での採用例はなくマニアックな方式です。操舵はフロントタイヤ、駆動はリアタイヤと役割が前後輪で分担されているので効率的で、高出力エンジンに対応できます。フロントが軽いため、旋回性能に優れています。
リアの車軸の後方にエンジンを搭載するので室内空間は確保できますが、荷室がフロントの限られた空間しか確保できません。オーバーステアの傾向が強く、中上級の運転技術が必要です。
4WD(4ホイールドライブ)方式
AWD(オールホイールドライブ)とも呼ばれ、各社独自の4WDシステムが開発されています。4つのタイヤで効率的に出力が伝わるので、悪路や雪路などでも安定して走行できるのが最大の特徴です。
しかし、車体が重く燃費が悪くなりやすく、またコストも高くなります。
駆動方式の違いによって、それぞれ強みと弱みがあります。車の特性を理解した上で運転することが重要ですし、安全運転につながります。
本章では、さまざまな駆動方式の詳細について、個々に解説していきます。
■FF(フロントエンジン・フロントドライブ)とは
FF方式は、フロントにエンジンを搭載した前輪駆動方式で、コンパクトカーやミニバンだけでなく、最近はSUVにも採用されている主流の駆動方式です。
なぜ主流となっているのでしょうか、FF方式の構成と特徴について、解説していきます。
FF方式の構成と特徴
FF方式は、エンジンとトランスミッション、操舵装置がフロントに搭載されたシステムです。現在は、軽自動車やコンパクトカーから、ミニバン、SUVまで広く採用され、駆動方式の主流となっています。
最大の特徴は、前輪が駆動輪と操舵輪を兼ねていることで、フロントタイヤや前輪ブレーキの負担が大きくなります。フロントの重量配分が60%前後と重く、これが良くも悪くもFF車を特徴づけています。
FFのメリット
主要機構がフロントに集中しているので、FRのように長く太いプロペラシャフトを前後に通す必要がないため、車室が広くとれます。特に小型車においては、車室空間レイアウトの自由度が高いことは非常に有利です。
エンジンとトランスミッションは、通常横置きなので、動力伝達の方向を変更することなく、駆動軸に連結でき、伝達効率が優れているため燃費的に有利です。
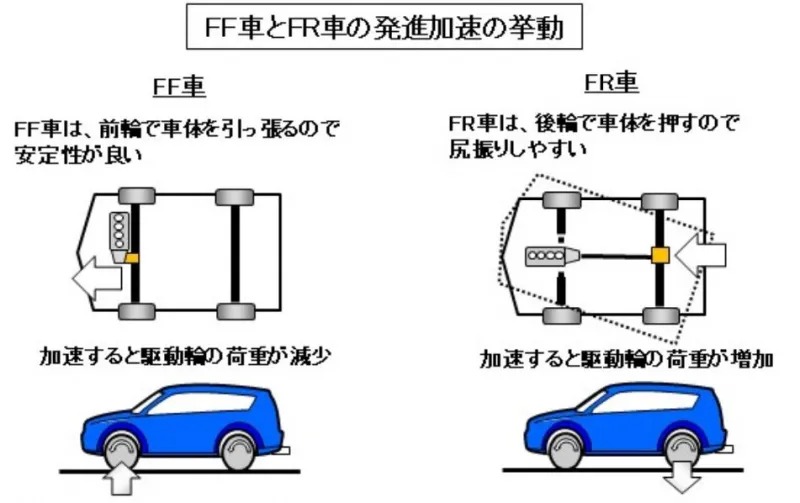
重い前輪で車を引っ張るため、直進安定性に優れています。また、悪路や雪路での走行安全性にも優れています。FRに比べると、プロペラシャフトの不要など、部品点数が少ないため、コストが安く、軽量化できます。
FFのデメリット
主要機構をフロント(ボンネット下部)に収めるため、コンパクトにする必要があり、機構が複雑になります。当初は、この複雑さがFF化のネックになっていました。また、駆動力と操舵力を同時に前輪が負担するため、重い車両や高出力の車には向きません。
走行安定性に優れたFFですが、一方で発進からの加速が鈍いという弱点があります。急発進すると後輪に荷重が移動し、前輪荷重が減少します。前輪のトラクションが弱まることで加速力が低下してしまいます。
FF車の旋回性能
FF車のコーナリング特性は、基本的にはアンダーステア傾向です。
コーナーで加速すると、フロントが重いために前輪のスリップアングルが後輪のスリップアングルより大きくなり、アンダーステアになりやすくなります。アンダーステアとは、旋回周よりも外側に膨らみ、曲がり切れなくなる現象です。
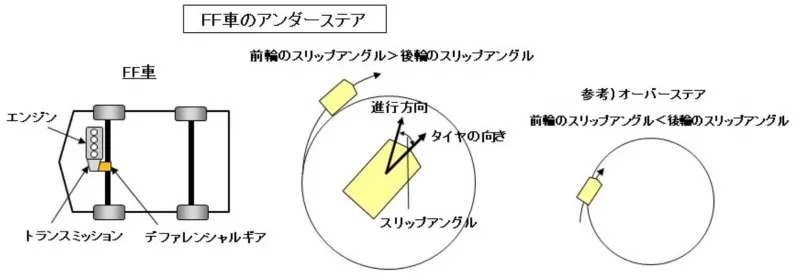
一方でコーナリング中に減速すると、エンジンブレーキが効いて前輪のスリップアングルが後輪のスリップアングルより小さくなって、オーバーステア傾向になります。オーバーステアとは、旋回周よりも内側に縮み、曲がりすぎる現象です。
FF方式は、過去には小型車中心に採用されていました。改良が進み、かつては採用が困難とされていた2L以上の中大型車への採用が進み、現在は主流となりました。
車室空間の広さと操縦安定性に優れ、運転技量によらない扱いやすさが、飛躍的に普及した要因です。
■FR(フロントエンジン・リアドライブ)とは
FR方式は、フロントにエンジンを搭載し、プロペラシャフトを介して後輪を駆動させる方式で、スポーツ車や高級セダンに採用されています。
なぜ高性能車や高級車に採用されるのでしょうか、FR方式の構成と特徴について、解説していきます。
FR方式の構成と特徴
FRは、フロントにエンジンを搭載し、プロペラシャフトとディファレンシャルギアを介して、後輪を駆動するシステムです。
自動車黎明期から長く採用されていますが、近年のFF方式の急速な普及によって、現在はその特徴を生かした高性能車や重量車、高級車で採用されています。
重量のあるエンジンやトランスミッション、プロペラシャフト、ディファレンシャルギアが前後に分散しているため、FF車に比べると前後の重量バランスは均等に近づきます。ただし、長く太いプロペラシャフトが必要なため伝達効率のロスが発生し、車重が重くなります。
トランスアクスル
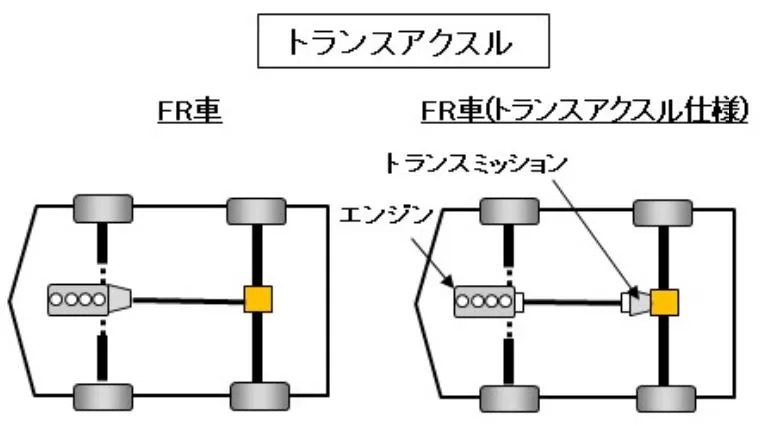
高性能FR車の一部モデルには、車両の前後重量を適正にバランスさせるため、トランスアクスルが使われています。これは、前輪側に配置されたトランスミッションをエンジンから切り離し、後輪側のデフと一体化した動力伝達機構です。
日本では、日産・GT-Rとトヨタ・レクサスLFAが採用しています。
FRのメリット
前輪は操舵、後輪は駆動というように、効率的に役割が分担されるため、タイヤへの負担が分散されます。後輪で押すように走るので操舵は軽快で、しかもフロントに空間的な余裕があるので、タイヤの切れ角が大きく、小回りが利きます。
後輪駆動なので、発進加速や登坂走行時には、荷重移動によって後輪に大きなトラクションが発生します。エンジンの出力を効率的に車の推進力にできるので、高性能車で採用されます。
前輪に荷重がある後輪駆動なので操作性に優れ、ドリフトなど車体のコントロールがしやすいため、スポーツ車に向いています。
FRのデメリット
エンジンは縦置きで、トランスミッションが車室内に張り出し、プロペラシャフトが車室下中央を通るため、車室空間が広くとれません。これが、コンパクトカーに採用されない理由です。
雪道などの発進加速では、他の方式に比べて駆動輪の荷重が軽いため、グリップ不足によって不安定になります。雪道やぬかるみでスタックしたときに、抜け出しにくくなります。
FF車よりも部品点数が多く、コストが高くなってしまいます。
FR車の旋回性能
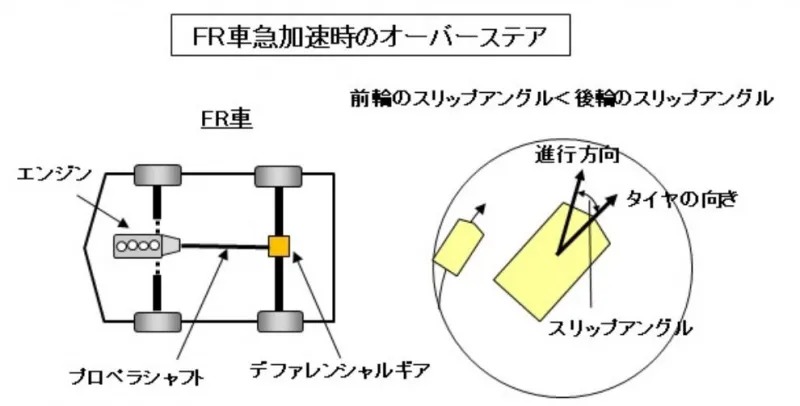
FR車のコーナリング特性は、基本的にはほぼニュートラルステアに近い素直な特性です。ただしコーナーで急加速すると、前輪のスリップアングルよりも後輪のスリップアングルが大きくなり、オーバーステアになる傾向があります。
現在は、車室空間やコストの面からFF車が主流ではありますが、FR車は高性能車の操縦性を楽しむ人たちからは好まれています。トヨタ・86、日産・スカイライン、フェアレディZ、マツダ・ロードスターなど、憧れのスポーツ車はFRが多いです。
■MR(ミッドシップエンジン・リアドライブ)とは
MR方式は、車体中央近傍にエンジンを搭載し、後輪を駆動させる方式で、通常2シーターなので、F1などのレースカーやスーパーカー、スポーツ車に採用されています。
理想的な前後輪の重量配分で、優れた走行性能をもつMR方式の構成と特徴について、解説していきます。
MR方式の構成と特徴
MRは、前輪と後輪の間にエンジンを搭載し、後輪を駆動するシステムです。一般にはエンジンを後輪車軸の前方に搭載したリアミッドシップですが、エンジンを前輪車軸の後方に搭載したフロントミッドシップもあります。
前後輪の重量配分を等分設定し、さらに重量の重いエンジンやトランスミッションなどを極力車両近傍に配置することによって、中央重心を実現しています。車の重量を中心に集中させると、コーナリング時の車体ヨー(水平方向に回転しようとする動き)を減少させることができます。
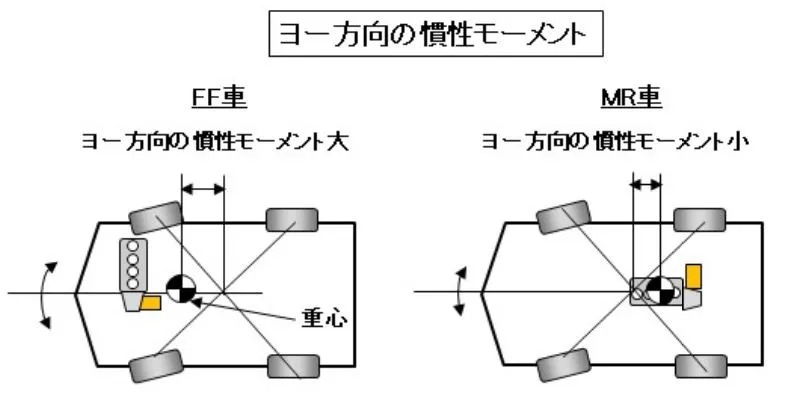
MRのメリット
車体重心が中央近傍に設定できると、旋回運動が速く、収束性能も良くなります。MRの最大の特徴は、ステアリング操作に対して、レスポンスが良く運動性能が優れていることです。FFはアンダーステア、FRはオーバーステア傾向になりやすいですが、MRはコーナーに素直に沿うニュートラルステアになります。
駆動輪である後輪のトラクションが強いため、加速力が強く、安定性にも優れています。また、前輪が操舵、後輪が駆動と前後輪の役割が分担されているので、高出力エンジンにも対応できます。
FFのようにフロントに多くの機構が集中せず、FRのようなプロペラシャフトが不要なので、駆動系がシンプルになるメリットもあります。フロントが軽いため回頭性に優れ、またフロントにエンジンがないのでフロントを低くでき、スタイリッシュなデザインが実現できます。
MRのデメリット
エンジンを通常の車の後席付近に搭載するため、車室や荷室に十分なスペースが確保できず、2シーターになるので普通の乗用車には適しません。また、運転者とエンジンが近いので、エンジン音や熱の遮断対策が必要です。
基本的にはコーナリング特性は安定したニュートラルステアですが、限界を超えるとコマのようにスピンするリスクがあります。運転には、中上級の運転技術が必要です。
意外な車がMRな場合も
F1やLMPカーなどのレーシングマシンは、ほぼすべてMRです。一方で、高性能とは無縁の軽トラや1ボックス車でMRを採用しているケースがあります。これらは、空車時と積載時の前後重量配分の変化を少なくするために採用しています。
MR車の代表格は、フェラーリとランボルギーニですが、日本ではホンダ・NSXやホンダ・S660、過去にはトヨタ・MR-Sがありました。例外はありますが、MRの採用は、居住性より走行性能を重視するレースカーやスポーツカーに限定されます。
■RR(リアエンジン・リアドライブ)とは
RR方式は、車体後部(後輪車軸より後方)にエンジンを搭載し、後輪を駆動させる方式でポルシェが採用していることで有名ですが、一般には普及していません。
車体姿勢のコントロールが難しいマニアックなRR方式の構成と特徴について、解説していきます。
RR方式の構成と特徴
RRは、後輪車軸の後方にエンジンを搭載し、後輪を駆動するシステムです。MRが後輪車軸の前方にエンジンを搭載するのに対して、RRでは後輪車軸の後方にエンジンを搭載します。
FFと対照的に、車体後部に重量が集中し、これが走行性能に大きな影響を与えます。エンジンと駆動輪が近接しているので、軽量化できて広い室内空間が確保できる点は、FFと同様です。
また、エンジンが車体後部に搭載されていることから、フロントに設置するラジエターとの冷却水配管やパワーステアリングとの油圧配管など、エンジン補機関連のレイアウトが複雑で非効率です。
RRのメリット
駆動する後輪に大きな軸重がかかるので、発進加速時のトラクションに優れ、力強い加速が得られます。アクセルの踏み方で車体姿勢をコントロールでき、スポーティな走りが実現できます。
また、操舵と駆動が、前後輪でその役目を分担しているので高出力エンジンにも対応できます。フロントが軽いため回頭性が良く、またフロントに空間的な余裕があるので、タイヤの切れ角が大きくとれ小回りが利きます。
ブレーキング時には、フロントに荷重がかかるので、リアが重いRRでは、前後輪にバランス良くブレーキがかかります。ブレーキ性能の良さは、ポルシェの売りのひとつでもあります。
またフロントにエンジンがないのでフロントを低くでき、スタイリッシュなデザインが実現できます。
フロント軸重が小さい分、ステリング操作が軽くなります。パワーステアリングがない頃は、これが大きなメリットであり、さらに広い車室空間の確保と低コストが、かつては(50年以上も前の話ですが)、RRが小型車で採用されていた理由です。
RRのデメリット
トラクションが強いというメリットはありますが、一方でコーナリング時には運転技術が必要です。
一般に後輪駆動車はオーバーステア傾向になりますが、特にRRはその傾向が強く、車体姿勢のコントロールが難しいです。素早いコーナリングには、高度なアクセルワークなど運転技術が必要です。
ステアリング操作が軽いことは、一方で直進安定性が良くないことを意味します。特に高速走行の安定性が悪化します。FFのように、操舵輪に荷重がかかっている方が直進安定性に優れています。
慣性モーメントを意識した運転が必要
RRでは、車両後方に重量物が集中しているため、車体ヨー(水平方向に回転しようとする動き)の大きな慣性モーメントが発生します。これを修正するためのカウンターステア(修正舵)の操作に、他の方式よりも高度な運転技術が必要です。
過去には、小型車を中心にRR方式が主流の時代がありましたが、車の高速化やFF方式の進化とともに、FFにその座を譲り、現在は最もマニアックな駆動方式となりました。
■トランスアクスルとは
高性能FR車の一部モデルでは、車両の前後重量を適正にバランスさせるため、トランスアクスル方式が採用されています。これは、前輪側に配置されたトランスミッションをエンジンと切り離し、後輪側のデフと一体化した動力伝達機構です。トランスアクスルの機構とメリットついて、解説していきます。
トランスアクスル
トランスアクスルとは、トランスミッションとデフを一体化した動力伝達機構を指します。エンジンが駆動輪近くに配 置されるFF車やRR(リアエンジン・リアドライブ)車、MR(ミッドシップエンジン・リアドライブ)車の伝達機構もトランスアクスルと呼ばれます。また、モーターとエンジンを搭載するHVやPHEVでも、モーター駆動のためにトランスアクスルを採用するのが一般的です。
ここでは、トランスアクスルの代表例として、FR車への適用に限定して、説明してきます。
トランスアクスルのメリット
車の操縦性や運動性能を向上させるには、重心を下げ、重量を車両中央に集中させるか、車両の前後重量のバランスをとることが、効果的です。
重量を車両中央に集中させるのが、エンジンとトランスミッションを車体中央に配置するミッドシップ方式です。レーシングカーでは、このミッドシップが主流となっています。
FR車で車両の前後重量のバランスをとる手法が、トランスアクスルです。トランスミッションを後輪側に移動させることで、車両前後の重量配分が均等になるため、車両性能を最優先する特定のスポーツ車に採用されています。
ただし、トランスアクスルは複雑な構造や、プロペラシャフトの振動・騒音対策が必要なことから、どうしてもコストが高くなり、一般の市販車への採用は難しいです。
トランスアクスルの採用例
トランスアクスルを市販車に採用した例は少なく、1970~1980年代に生産されたアルファロメオのアルフェッタ、ジュリエッタが有名です。50:50の理想的な前後重量配分を実現し、走りについては高い評価を得ました。
一方で、スポーツ車として採用された例は比較的多く、ランチア、フェラーリ、ポルシェなど、走りに特化したモデルで採用しています。日本では、日産・GT-Rとトヨタ・レクサスLFAが採用しています。
日産・GT-Rは2007年から発売された4WDですが、トランスアクスルはトランスミッションとデフのみならず、クラッチや4駆システムを含めて1ユニット化し、後輪側に配置しています。このタイプのトランスアクスルは世界初であり、適切な前後重量配分を実現し、GT-Rの圧倒的な走りと安定性に貢献しています。
トヨタ・レクサスLFAは、2010年に発売された世界限定500台の高級スポーツカーです。エンジンなどの重量パーツを、低重心でできるだけ車両の中央に寄せることを目標に、トランスアクスルを後輪の直前に配置しています。前後重量配分は、48:52とやや後方よりです。また、CFRPボディなど徹底した軽量化技術も盛り込み、GT-Rにも負けない高性能を実現しています。
FR車のトランスアクスルは、車の操縦性や運動性能を左右する車両の重量配分を、適正にするための機構です。
効果的な手法ですが、コストや居住性の問題から市販車に展開するのは難しく、今後も採用はレーシングカーやスポーツ車に限定されるでしょう。
■デファレンシャルギアとは
車がコーナーを曲がるときには、左右のタイヤの進む距離は違います。デファレンシャルは、左右駆動輪の中間に位置し、左右輪の回転差を吸収してスムーズに旋回させる機構です。
デフの構造や作動原理について、解説していきます。
デファレンシャルの必要性
車がコーナーを曲がるときには、左右(内側と外側)のタイヤの進む距離は異なります。もし両方のタイヤの回転数が同じだとすると、内側のタイヤは路面をスリップしながら回転することになり、タイヤは摩耗しドライブシャフトへも大きな負荷がかかります。
これを解決するのが、状況に合わせて左右輪の回転差を吸収してスムーズに旋回させるデファレンシャル(以下、デフ)機構です。
デフの構造
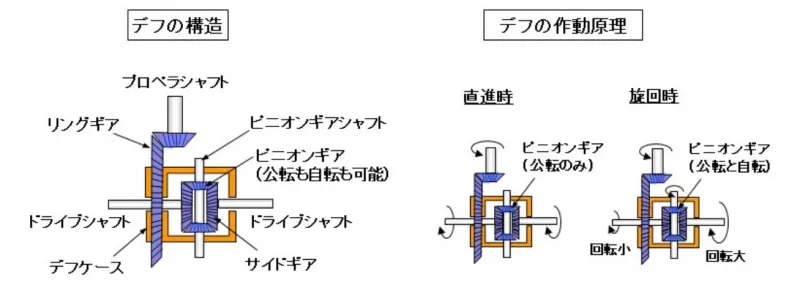
デフは、ファイナルギアの内部に4個の円錐形のベベルギアを組み合わせて構成されています。タイヤを駆動させるドライブシャフトは、デフのリングギアに直接繋がっているわけではありません。
リングギアの回転は、デフケース、ピニオンシャフト、ピニオンギア、サイドギアを介してドライブシャフトに伝えられます。リングギアはデフケースと一体となっており、同じ方向に回転します。
デフケースには、ピニオンギアが貫通しており、ピニオンギアシャフトがデフケースと一緒に回転することにより、ピニオンギアと噛み合っている左右のサイドギアを介して車輪に回転が伝えられます。
デフの作動
・左右駆動輪の同じ回転を伝える直進走行
リングギアと一体となっているデフケース内にあるピニオンギアは、ピニオンギアシャフトと一緒にドライブシャフトの周りを回転(公転)し、左右のサイドギアに同じ回転を伝えます。このとき、ピニオンギア自体は回転していません。
・左右駆動輪に異なる回転を伝える旋回走行
旋回時には、左右の駆動輪の回転数は異なります。回転数が同じだと、曲がることはできません。外輪は、内輪よりも多く回転しようとします。外輪側のサイドギアは、内輪側のサイドギアよりも多く回転しようと、左右のサイドギアで回転抵抗の差が生じます。
このときピニオンギアが自転を始めて、左右のサイドギアに異なった回転を伝えます。これを差動効果といい、スムーズな旋回を実現します。
LSD(リミテッドスリップデフ)
駆動輪の片方がぬかるみに入ってしまうと、その駆動輪にかかる回転抵抗は大きく減少します。デフは抵抗の少ない方により多く回転を与えてしまうので、空転してしまいます。もう一方の駆動輪は、デフから回転が伝わらないので、結局車はスタックしてしまいます。
このデフの弱点をカバーするのが、LSD(リミテッドスリップデフ)やデフロックでデフによる作動効果に制限を加えた装置です。
一般的な4WD車や高性能スポーツ車では、駆動輪の空転を抑えるため、状況によって自動的に高回転側から低回転側にトルクを移して同回転にするLSDやデフロックを装備しています。
デフは、スムーズに旋回するために不可欠な装置ですが、普段はその効果の有難みを感じることはありません。ただし、スポーツ走行やドリフト走行を好む人にとっては、車の性格が変わるほどの影響力があり、チューニングの対象です。
■4WDとは
オフロードの4WDといったイメージが強いですが、最近は滑りやすい路面や高速路での安定した走行のような実用的な用途で好まれています。
多くの4WDシステムがありますが、まずはその種類について解説していきます。
4WDのメリット・デメリット
FFの前輪駆動やFRの後輪駆動の2WDに対して、4WDは4輪すべてを駆動します。駆動力が効率的に路面に伝わり、悪路走破性や雪路など滑りやすい路面の発進加速や登坂性能、高速安定性に優れています。
従来は、オフロード専用というイメージの4WDでしたが、最近は一般路での走行安定性などの実用性の高さが注目され、高性能のスポーツ車や多目的用途のRV車、さらには乗用車にまで採用が拡大しています。その結果、各メーカー独自のさまざまなタイプの4WDシステムが開発されています。
一方で、駆動力を前輪と後輪に振り分ける「トランスファー」、前後輪の回転差を吸収する「センターデフ」、トランスファーと前後輪のデフをつなぐ「プロペラシャフト」などの構成部品が必要なため、コストと車重が増し、燃費も悪化してしまいます。
パートタイム4WDとフルタイム4WD
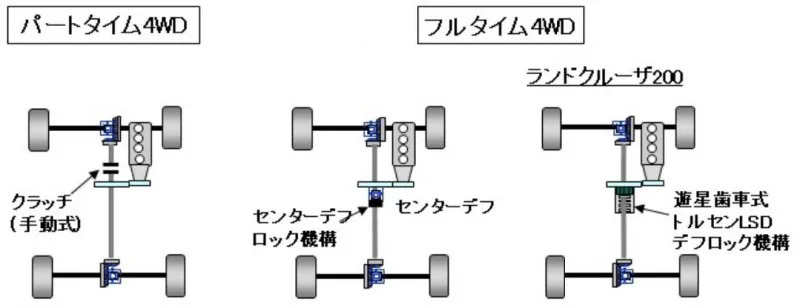
4WDには、手動で2WD/4WDを切り替えて、必要な時だけ4WDとする「パートタイム4WD」と、常時4WDの「フルタイム4WD」に大別されます。
パートタイム4WDは、市街地などの一般路走行では2WDで走行し、オフロードや雪道では切り替えスイッチで4WD走行が選択できるようにしたシステムです。4WDの燃費の悪さを回避するため、2WDの走行を可能にしたものです。安価なため、小型車向きでスズキ・ジムニーなどが採用しています。
フルタイム4WDは、通常は前後輪に駆動力を配分するセンターデフを設置して、常時4WDで走行できるようにしたシステムです。コーナリング時などに前後輪の回転差を吸収し、適切な駆動力配分で走行できます。機構が複雑でコストも高く車重も増すので、大型SUVに採用されるケースが多く、トヨタ・ランクルに採用されています。
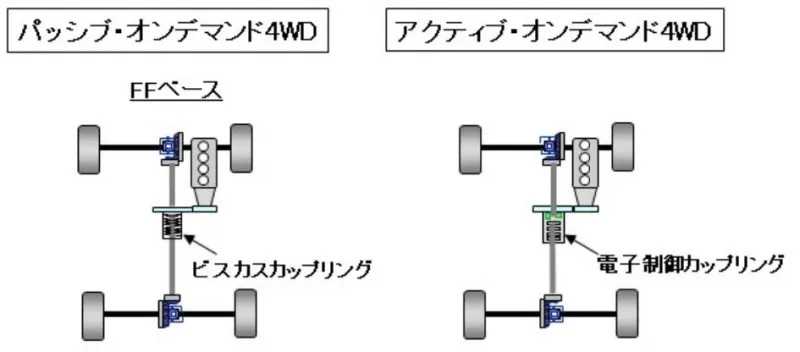
パッシブ・オンデマンド4WDとアクティブ・オンデマンド4WD
「オンデマンド4WD」は、パートタイム4WDのような手動切り替えではなく、走行状況に応じて自動で2WDと4WDに切り替える方式です。
「パッシブ・オンデマンド4WD」は、流体クラッチの一種であるビスカス(粘性)カップリングや油圧多板クラッチによって、前後輪の回転差に応じて前後輪の駆動力を配分します。2WDベースで、前後輪の回転差が大きくなると4WDになります。滑って初めて後輪が駆動し4WDになるので、応答性が問題になる場合があります。
フルタイム4WDのような複雑な機構が不要なので、軽量で低コストというメリットがあり、小型車で採用されています。
「アクティブ・オンデマンド4WD」では、電子制御カップリング(油圧多板クラッチの油圧を電磁クラッチで制御)によって、前後輪の駆動力を配分します。
電磁クラッチの高応答に加えて、多くの車両情報を使って滑りを予知して制御するため、リアルタイムで高精度に制御できます。SUVや乗用車系で使われている4WDの多くは、アクティブ・オンデマンド4WD方式です。
フォレスター、CX-3、レヴォーグ、エクストレイルなどで採用されています。
電動式4WD
電動車が普及する中、4WDについても電動化が進んでいます。エンジンとモーターを協調制御したり、個々に独立制御したり、またモーターのみのフルタイム4WDなどがあり、高精度に応答性良く制御できるメリットがあります。
多くの4WDシステムの中から、代表的なセンターデフ式とオンデマンド式、電動式4WDについては、別頁で解説します。
■センターデフ式4WDとは
通常フルタイム4WDでは、センターデフによって前後輪の回転差を吸収しながら駆動力を前後輪に配分します。
センターデフ式4WDの構造や作動原理について、解説していきます。
センターデフ式4WD
車には、左右の駆動輪の内輪差を吸収してスムーズなコーナリングを実現するために、デファレンシャル(差動装置:別頁で詳細に解説)が装備されています。この機構を、前後輪の回転差を吸収するために利用するのが、センターデフです。
4WDで急旋回すると、前後輪の軌跡が異なるため、回転速度差によってブレーキがかかったような「タイトコーナーブレーキング」現象が起こります。これを回避するために、センターデフ機構が必要なのです。
センターデフの取り付け場所は、FRベースの4WDではトランスファーと後輪用プロペラシャフトの間に組み込まれます。エンジン横置きのFFベースの場合も、後輪用プロペラシャフトの前端に取り付けられますが、トランスファーと一体構成になっているのが一般的です。
センターデフのロック機構
デフ機構では、どこかの車輪のタイヤが空転すると、回転抵抗が少ない方により多く回転を伝えようとし、接地している他の車軸に回転が伝わりにくくなります。それを避けるため、デフの差動に制限を加えるLSD(差動制限装置)や固定するデフロックを装備しています。
センターデフも同様に、ほとんどがLSDやデフロックを装備しています。
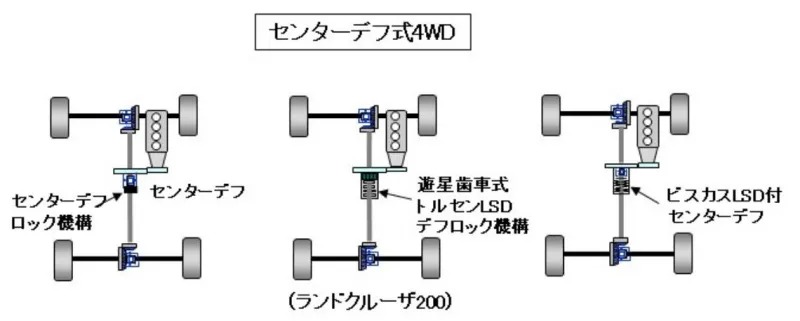
機械式センターデフ方式
遊星歯車(プラネタリー)機構や傘歯車(ベベルギア)機構の組み合わせで、駆動力を前後輪に分配します。駆動力をトランスファーによって前後輪に分配しますが、前後のデフのギア比を変えることによって前後の駆動力配分を設定できます。
スリップしやすい雪路や悪路走行などで用いる場合は、空転を防ぐためにLSDやデフロックを組み合わせる必要があります。
トルセン・センターデフ方式
ウォームギアを組み合わせたデフギアで構成されています。片側にトルクが集中すると、ピニオンギアにねじり応力が発生して、反対側に駆動力を伝える自己LSD機能を持ちます。
片側のトラクションが消失することで、差動機能が制限されます。センターデフとしては差動制限装置にもなるため、デフロックなどは不要になります。
ビスカスカップリング・センターデフ式
シャフトとともに回転するインナープレートと、ケースとともに回転するアウタープレートが交互に配置され、その中に粘性の高いシリコンオイルが満たされています。
両者に回転差が生じると、オイルのせん断力によって、遅いシャフトは速いシャフト(主軸)によって連れ回されます。さらに回転差が大きくなると、プレート同士が密着して直結の4WDになります。
軽量で制御機構を必要とせず、コストも抑えられるため、デンターデフ方式で最も採用されています。
多板クラッチ・センターデフ方式
トランスファーで分配した駆動力を、多板クラッチの制御によってもう一方の駆動軸に伝え、駆動力を分配します。
前後輪に差動が生じると、油圧によってクラッチ・プレートとディスク・プレートを密着させて回転を均等にします。状況によっては半クラッチにして前後のトルク配分を調整します。
センターデフ式フルタイム4WDシステムは、本格フルタイム4WDとして雪道に強いオフロード車と位置付けられています。その分コストと車重が増すため、乗用車系には向きません。代表格はトヨタの大型SUVのランクルです。
■オンデマンド4WDとは
オンデマンド4WDは、パートタイム4WDのような手動切り替えではなく、走行状況に応じて2WDと4WDを自動で切り替える駆動方式です。
現在4WDの主流であるオンデマンド4WDの構成や特徴について、解説していきます。
オンデマンド4WD
オンデマンド4WDは、スタンバイ式4WDとも呼ばれ、通常は2WDで走行し、状況(要求)に応じて自動で4WDになるシステムです。駆動力制御と応答性の違いで、「パッシブ・オンデマンド4WD」と「アクティブ・オンデマンド4WD」に分けられます。
パッシブ・オンデマンド4WD
かつて多く採用されていたのは、ビスカスカップリングで駆動力を前後輪に分配するパッシブ・オンデマンド4WDです。通常は2WDで走行し、悪路で駆動輪が滑り始めると、前後輪の回転差に応じて駆動力を後輪に伝えて4WDにします。
駆動輪のスリップを検知して、滑り始めてから4WDになることから「パッシブ(受け身の)・オンデマンド」と呼ばれています。タイムラグがあって4WDになることから、「なんちゃって4WD」と揶揄されることもあります。
最近は、後述のアクティブ・オンデマンド4WDが主流となっていますが、コストがかからないのでスズキ・ハスラーやワゴンRなどの軽自動車、コンパクトカーで採用されています。
シリコンオイルの粘性を利用
ビスカスカップリングは、シャフトとともに回転するインナープレートと、ケースとともに回転するアウタープレートが交互に配置され、その中に粘性の高いシリコンオイルが満たされています。両者に回転差が生じると、オイルのせん断力によって、遅いシャフト(被駆動軸)は滑っている速いシャフト(駆動軸)に連れ回されます。さらに回転差が大きくなると、プレート同士が密着して直結の4WDになります。
アクティブ・オンデマンド4WD
アクティブ・オンデマンド4WDは、パッシブ・オンデマンド4WDのビスカスカップリングの代わりに、高度な電子制御カップリングを使います。滑ってからではなく、滑りを予知する高精度制御によって応答性を向上させています。
予知制御とは、環境条件や路面状況、ドライバーが気づかないレベルの車両の挙動などの情報から、滑りを予知してタイヤが滑り出す前に、駆動力配分を制御する手法です。さらに、エンジンやブレーキなどとの車両統合制御によって、刻々と変化する車両の状況に素早く対応し、最適な駆動力制御を実現します。
本格的なセンターデフ式フルタイム4WDに比べると軽量でコストもかからないので、現在はSUVや高性能車で主流となっています。マツダ・CX-5(i-ACTIV)やホンダ・ヴェゼル(リアルタイム4WD)、BMW・X3(xDrive)など、多くのモデルで採用されています。
電子制御フルタイム4WD
スバルのXVやフォレスターの「ACT(アクティブ・トルク・スプリット)-4WD」は、電子制御フルタイム4WDと呼ばれています。通常は前輪と後輪のトルクが60:40に配分され、若干FF寄りのトルク配分を基本としながらも、4輪の駆動状況を常にモニタリングしながら、必要に応じてトルク配分率を100:0~50:50まで変化させる4WDシステムです。
トヨタのプリウスが4WDを設定したことからもわかるように、4WDはマニアックな機能でなく、市街地からオフロードまで走れる多目的な機能として位置づけられ始めています。
したがって、燃費の悪化は許容できないため、燃費と性能を両立させるオンデマンド4WDが普及してきました。
■電動式4WDとは
EVやPHEV、HEVなど電動車の普及が進む中、エンジンとモーター、あるいはモーターのみで4WDを実現する電動式4WDが増えています。
さまざまな電動式4WDの構成や特徴を、代表するモデルとともに解説していきます。
電動式4WDのメリットとデメリット
従来の機械式フルタイム4WDに対して、エンジンとモーターの組み合わせ、またはモーターのみで4輪を駆動するのが、電動式4WDです。エンジンの出力とは無関係に4輪の駆動力を制御でき、より自由度の高い車両性能が得られます。プロペラシャフトなどが不要となり、車体設計の自由度が高くなり、さらに減速回生による燃費性能の向上も図れます。
一方で、モーターや電池など電動化部品によって、コストが高くなることが課題ですが、電動車の技術進化とともに、電動式4WDの普及も進み始めました。
電動式4WDは、エンジンとモーターの組み合わせや使い方の違いによって、以下の3方式に分けることができます。
エンジン/モーター協調型
機械式4WDのように、エンジンとモーターの駆動力を、センターデフを介して前後輪に分配する方式です。機械式と同様、駆動のダイレクト感を実現できます。欧州ではBMWやAudi、VWのハイブリッドSUVで採用され、日本ではスバル・XVのハイブリッドが協調型に相当します。
これらは、変速機内にモーターを組み込んだパラレルHEVで、EV走行時にはトランスファーを介してモーターによるフルタイム4WDになります。
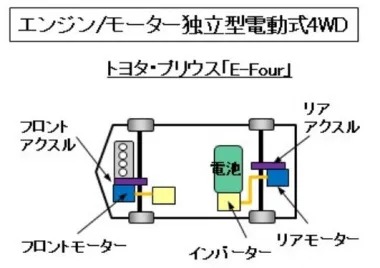
エンジン/モーター独立型
エンジンとモーターを独立にして、4WDのうちエンジンが前輪または後輪を駆動し、残りの駆動輪をモーターで駆動させる方式です。プロペラシャフトがなく、レイアウト上の自由度が上がります。
独立型としては、前輪をモーター、後輪をエンジンで駆動するPHEVのBMW「i8」があります。日本では、トヨタ・プリウス「E-Four」やホンダ・レジェンド「SPORT HYBRID SH-AWD」が相当します。
プリウスは、前輪はエンジンとモーターを組み合わせて駆動しますが、後輪はモーターのみで駆動します。レジェンドも同様ですが、後輪は左右独立式のモーターで駆動し、旋回時はトルクベクタリングします。
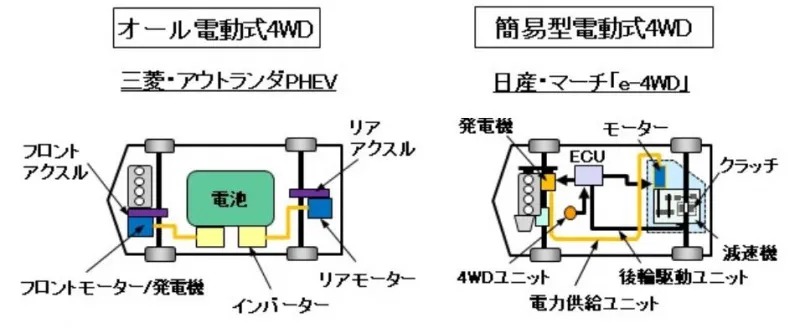
オール電動型
前輪と後輪にそれぞれモーターを配置し、4輪を駆動します。エンジン車と比べて、力強い走りと低燃費を両立できます。
三菱・アウトランダーPHEVは、モーター駆動を主とするオール電動型4WDです。前後輪にそれぞれ駆動用のモーターを搭載しています。エンジンも搭載していますが、これは基本的には電池充電のための発電用です。
簡易電動型
日産・マーチやマツダ・デミオが採用している「e-4WD」は、簡易型電動式4WDです。
FFベースで後輪をモーターで駆動する4WDですが、モーター駆動用の電池はなく、エンジンによる発電でモーターを駆動させます。したがって低速域のみ駆動する4WDシステムで、発進時や登坂時の補助的な役割を果たします。
電動式4WDの最大のメリットは、機械式に比べてシステム全体をシンプルかつコンパクトにできること、さらに軽量で車体のレイアウトの自由度も高く、メカニカルロスも低減できます。
電動車が増えていけば、必然的に普及する電動式4WDですが、やはり駆動用モーターと電池のコストがネックでしょう。
(Mr.ソラン)
クリッカー自動車用語辞典 https://clicccar.com/glossary/