
目次
■車に搭載されているセンサーとは
車の燃費や排ガス、予防安全のための高度な制御は、状態の計測【センサー】と演算・判断【コンピューター】、動作【アクチュエータ】で構成されます。その中でもセンサーによる計測技術は、近年急速に進化しています。
エンジンと車両の制御のために採用されている各種センサーについて、概説していきます。
センサーの検知対象
車に搭載されるセンサーは、燃費向上や排ガス低減、予防安全技術などの高度化に応えるため、1台あたり150~200個程度装着されています。
検知対象は、物理量と化学量の多岐にわたります。
・流量:エアフロー、燃料
・温度:冷却水、潤滑オイル、吸気、排気、燃料、外気温
・圧力:吸入空気、燃料、過給、ブレーキ、タイヤ空気、コンプレッサー
・ガス:酸素、NOx、HCなどの排出ガス成分、アルコール
・速度:エンジン、トランスミッション、車速、車輪速
・加速度:エアバッグ、車両前後、サスペンション
・角度:クランクシャフト、カムシャフト、スロットル、操舵、方位
・角速度:ヨーレート、ロールオーバー、ナビ
・力、荷重:ブレーキペダル、操舵トルク、荷重
・振動:ノック
・光、電波、音波:レーザー、超音波、可視、赤外、日照、ライト、音声
センサーの用途
センサーの使い方を制御システムで分けると、パワートレイン制御、車両制御、ボディ制御、情報通信制御の4分野です。
・パワートレイン制御
ガソリン噴射制御、直噴制御、点火制御、ノック制御、ディーゼル噴射制御、排ガス制御、トランスミッション制御、モーター制御、電池監視
・車両制御
ABS(アンチロック・ブレーキ)、ESC(横滑り防止)、トラクションコントロール、ACC(アダプティブクルーズ)、サスペンション制御
・ボディ制御
オートエアコン、エアバッグ、オートライト、オートワイパー
・情報通信制御
ナビゲーション、ナイトビジョン、前後方監視、ETC
代表的なセンサー例
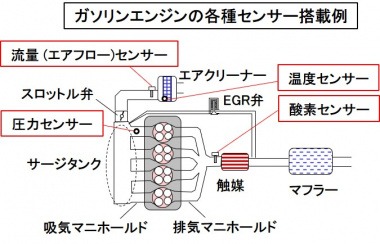
・基本的な物理情報を計測する流量センサー、温度センサー、圧力センサー
エアフローセンサーは、エンジンの吸入空気量を計測して、それに応じて適正な燃料量を供給して出力や燃費、排出ガスを制御します。
温度センサーと圧力センサーは、エンジンやトランスミッション、ブレーキなど車の基幹部品に使われ、さまざまなシステムの効率向上のための重要な制御因子として使われます。
・車両制御のための加速度センサー、回転速度センサー、ジャイロセンサー
衝突時の衝撃を加速度センサーで検出してエアバッグを展開します。
ABS(アンチロック・ブレーキ)、ESC(横滑り防止)など車両姿勢を適正に保つため、4輪それぞれの車輪速を計測する回転速度センサーやジャイロセンサーが使われます。
・運転支援や自動運転のための各種センサー
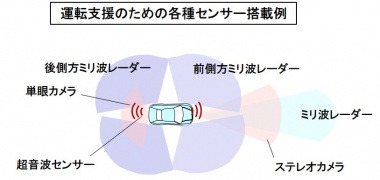
運転支援や自動運転のためには、車周辺の状況を検知するため多くのセンサーが必要です。
近距離の障害物を検知する超音波センサーや障害物の形状を認識できるカメラ、長距離の障害物が検出できるミリ波レーダー、夜間に強い赤外線カメラ、全周囲の3次元検出ができる次世代センサーのLiDARなどが採用されています。
さらに高度な運転支援や自動運転を実現するため、センシング技術の進化に大きな期待がかかっています。
センサーは、人間の五感の働きのようにさまざまな情報を収集して、ECUに送ります。多くのセンサーの信号があるからこそ、高度な制御技術を実現できます。特に運転支援技術、自動運転技術は、センサーの進化と密接に関係しています。
本章では、車の制御を支える各種のセンサーについて、詳細に解説していきます。
■エアフローセンサーとは
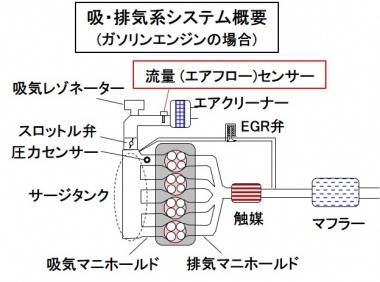
エアフローセンサーは、エンジンの吸入空気量を計測する流量センサーです。エンジンは、エアフローセンサーで計測した吸入空気量に応じて、適正な燃料量を供給して出力や燃費、排出ガスを制御します。
エンジンの燃焼制御のために高精度の計測が求められるエアフローセンサーについて、解説していきます。
吸入空気量の計測
エンジンを運転状況に応じて適正に制御するためには、刻々と変化する吸入空気量を正確に計測する必要があります。特に排出ガス低減のためには、エアフローセンサーの計測精度は重要です。
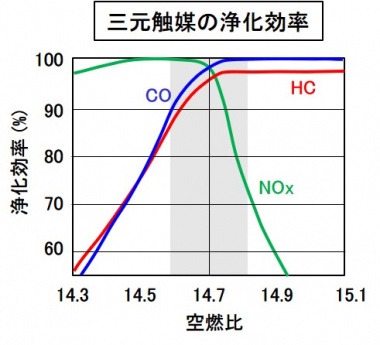
ガソリンエンジンの排出ガス低減には、CO、HC、NOxを同時に浄化する三元触媒を使います。三元触媒によって排出ガスを効率良く低減するためには、空燃比(吸入空気重量/供給燃料重量)を理論空燃比14.7に正確に制御する必要があります。
そのために、吸入空気量を精度良く計測することが不可欠なのです。
現在もっとも一般的に使われているエアフローセンサーは、ホットワイヤ式と最近普及し始めたMEMS(マイクロ電気機械)式です。そのほか採用例は少ないですが、カルマン渦式と可動プレート式があります。
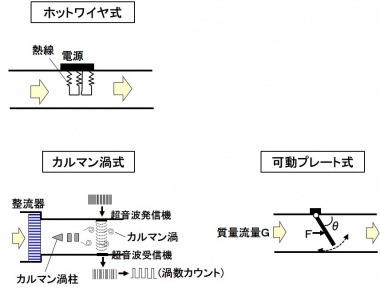
ホットワイヤ式
ホットワイヤ式エアフローセンサーは、白金の発熱線を流れに中に置き、空気の流れによって奪われる熱量から吸入空気量を求めます。
I²R = A + B√Q
(I:熱線プローブの加熱電流、R:熱線ブロー部の抵抗、Q:空気質量流量、A,B:定数)
電流によって加熱した白金熱線を空気が通過すると、熱を奪って抵抗が変化します。流速が速いほど多くの熱が奪われ、抵抗が下がって電流量が増えます。熱線の電流量を検出すれば、空気流量が計測できるという仕組みです。
原理的に質量流量が検出できるので、大気圧や気温の変化の影響を受けない、扱いやすいセンサーです。
MEMS(マイクロ電気機械)式
最近は、アトキンソンサイクルや可変バルブ機構、大量EGRシステムなど吸気系が複雑になり、それにともない脈動が大きくなり、吸気内に逆流が発生しやすくなっています。
そのため、吸気の脈動流や逆流も計測できる半導体のMEMS式エアフローセンサーが採用され始めました。これは、シリコンダイヤフラム式検出エレメントを使用して双方向の流れを計測するセンサーです。
カルマン渦式
流れの中に柱状の障害物があると、その下流には渦が発生します。その渦の数と流速には比例関係があるため、渦の数をカウントすることで吸入流量が求められます。
カルマン渦が発生した空気の下流に超音波を発射して、渦の数に応じて超音波の波形が変化することを利用して、吸入空気量を計測します。光学的に渦数を計測する手法もあります。
かつて三菱自動車が採用していましたが、圧力損失が発生するため現在、採用例はほとんどありません。
可動プレート式
空気が可動プレートに衝突して力が作用する原理を利用して、流量を計測する方法です。
プレートが受ける力は、質量流量の二乗に比例します。また、可動プレートにリターンスプリングが設置され、流速によって受ける力とバネ反力が釣り合う傾きをポテンシャルメーターで検出します。
F ∝ G2・sinθ (F:プレートにかかる力、G:質量流量、θ:流れとプレートとの角度)
可動プレートの傾きから、質量流量を算出できます。
ただし、可動プレートよる圧損があり、長期使用によって計測精度が低下するため、最近の採用例はほとんどありません。
運転条件に応じて変動する空気量を応答良く計測することは、車のレスポンスや燃費、排出ガス性能の向上のために非常に重要です。
現在は、信頼性が高く低コストのホットワイヤ式が主流ですが、最近になって吸気の脈動流や逆流の計測ができるMEMS式エアフローセンサーの採用が急増しています。
■温度センサーとは
高度化する車の制御技術に対応して、温度センサーの数も急速に増えています。温度センサーは、単に部品を壊さないように保証するモニターの役目だけでなく、各種システムの効率向上のために温度を制御する制御因子というアクティブな役割も担っています。
車で使われている各種温度センサーについて、解説していきます。
車に使われる温度センサーの性能
部品の耐久信頼性の確保やサーマルマネージメントによる向上効率のため、車には多くの温度センサーが使われています。
自動車用温度センサーに求められる性能は、以下の通りです。
・信頼性が高く、耐久性がある。
・小型で応答性が高い。
・振動と衝撃に強い。
・安価である。
要求される温度レンジや応答性は、装着する部位によって異なり、例えば温度レンジが広いエンジンの場合は-40度から1000度程度まで温度が変化します。
もっとも一般的な温度センサーは、サーミスタです。サーミスタの温度上限は400度程度なので、排気温度などそれ以上の温度に達する部位については、熱電対が使われます。また、温度によってON/OFFを切り替えるような場合は、バイメタルが使われます。
サーミスタ
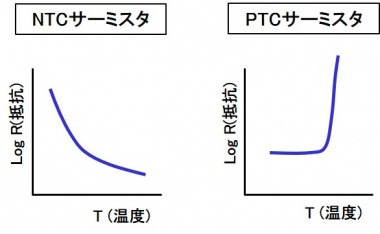
サーミスタは、温度の変化によって抵抗値が変わるセンサーで、抵抗値の変化の仕方によってNTC(Negative Temperature Coefficient Thermistor)サーミスタとPTC(Positive Temperature Coefficient Thermistor)サーミスタの2種類があります。
・NTC(負温度係数)サーミスタ
温度が上がると抵抗値が下がる特性の温度センサーです。リニアな特性ではありませんが、温度-60度~400度まで広い温度レンジの計測ができます。
温度係数が高いため扱いやすく、エンジン吸気温や水温、油温、エアコン関係温度など、多くの部位の温度検出や温度補償に使われます。
・PTC(正温度係数)サーミスタ
温度が上がると、ある温度を境に抵抗値が急激に上昇する温度センサーです。最近の車には、大小合わせて100個程度のモーターが搭載されています。モーターの中にはPTCサーミスタが組み込まれており、加熱検知や過電流保護用に使われています。
例えば、PTCサーミスタをモーターに直列に接続し、モーターに異常負荷がかかり高電流が流れると、PTCが発熱して抵抗値が上昇します。これによって、モーターに流れる電流が制限されるという使い方です。
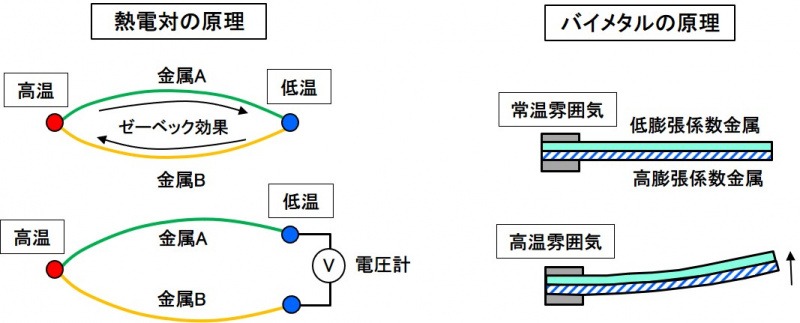
熱電対
400度を超えるようなエンジンの排気温度の計測には、熱電対が使われます。排気を浄化する触媒の温度を最適化する、あるいは異常温度上昇を検知するために使われます。
一般には、クロメル・アルメルを素線とした熱電対で、「ゼーベック効果」を利用しています。
ゼーベック効果とは、2種類の金属を接続して1つの回路(熱電対)を作り、2つの接点に温度差を与えると、電圧が発生する現象です。つまり、一方の(低)温度が分かれば、電位差からもう一方の(高)温度が計測できる仕組みです。
バイメタル
熱膨張係数の異なる2種類の金属を接着して板状にしたもので、温度変化に応じて板が湾曲します。この動きを利用して接点を開閉することにより、熱源または電源をON/OFFし、温度に応じて対象物を制御します。
エンジン水温の流れを切り替えるラジエーターやシートヒーター、ハンドルヒーターなどで使われています。
車用の温度センサーとしては、小型で応答性が良く、安価なサーミスタが主流です。
今後は、高速で回転する部位や高温部位などについては、非接触式の赤外線温度センサーなどの適用が期待されます。
■圧力センサーとは
圧力センサーは、エンジンやトランスミッション、ブレーキなど車の基幹部品に使われています。単に部品が壊れないように保証するモニターの役目だけでなく、エンジンや車の様々なシステムの効率向上のための重要な制御因子として使われます。
気体および液体の圧力を計測する圧力センサーについて、解説していきます。
圧力センサーの採用例
圧力センサーは、数多くの基幹部品やシステムで採用されています。温度センサーとともに主要な部品が壊れないようにモニターする役目と、燃費特性や排ガス特性のための最適な制御や安全な車両制御のための圧力情報を提供する重要な役目を担っています。
代表的な圧力センサーの使用例は、以下の通りです。
・エンジン
吸気マニホールドの吸気圧力や過給圧、エンジン油圧、燃料噴射装置の燃料噴射圧など
排気管内の圧力やDPF(ディーゼルパテキュレートフィルタ)内の圧力
・トランスミッション
トランスミッションの潤滑油圧や制御圧
・ブレーキ
ABS(アンチロックブレーキ)、ESC(横滑り防止)など、車両制御のためのブレーキ油圧
・エアコン
冷媒の圧力
圧力センサーに求められる性能
車用圧力センサーは、気圧と液圧の両方に対応するため、高圧中では耐久性が、液体中では耐腐食性が要求されます。また、限られたスペースに装着できるように小型であることも重要です。
使用温度は、-30度から300度を超えるような厳しい使用環境で、高い検出精度も必要です。通常は、1~2%FS(フルスケール)の高精度が要求されます。
参考に、代表的な圧力センサーの計測圧力と使用温度域の例を、以下に示します。
・ディーゼルコモンレール圧力:~200MPa (温度:-30度~120度)
・ガソリン直噴噴射圧力:~20MPa (温度:-30度~120度)
・パワーステアリング圧力:~7MPa (温度:-30度~120度)
・エアコンの冷媒圧:~3.5MPa (温度:-30度~135度)
・サスペンション・ダンパ圧力:~2MPa (温度:-30度~120度)
・高地補正用大気圧:~100kPa (温度:-30度~90度)
・エバポレータ―圧力:~5MPa (温度:-30度~120度)
半導体圧力センサー
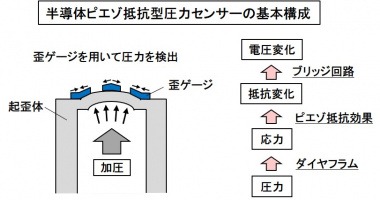
圧力センサーとしては、セラミック圧電型、静電容量型、半導体ピエゾ抵抗型などがありますが、通常、車用としては半導体ピエゾ抵抗型が多用されています。
半導体ピエゾ抵抗型の圧力素子の基本素子は、起歪体と歪ゲージで構成されます。起歪体は内部が空洞になっており、上部の円盤部が圧力を受けて上下に歪ます。円盤部の厚みで歪量が変化するので、計測の圧力レンジの調整ができます。
起歪体の上の薄膜歪ゲージが印加された圧力に応じて歪み、それに応じて抵抗値が変化します。抵抗値変化をホイートストンブリッジ回路によって電圧として検出します。
出力電圧を歪に変換して、精度良く圧力を求めます。
高度化するエンジンや車の制御技術に対応して、圧力センサーは温度センサーとともに採用数が増えています。同時に、計測精度は性能や効率に直結するので、高い精度も求められます。
現在は、半導体ピエゾ抵抗型に検出回路を一体化した、小型で精度の高い集積型圧力センサーが主流となっています。
■排ガス制御用センサーとは
自動車用の酸素(O2)センサーまたは空燃比センサーは、ガソリンエンジンの三元触媒による排出ガス浄化にとって不可欠な存在で、ほぼすべてのガソリンエンジンに装着されています。
酸素センサーとそれを応用したその他のガス検出センサーについて、解説していきます。
酸素センサーの必要性
ガソリンエンジンのほぼすべてが、三元触媒を使って排出ガス規制に適合しています。
三元触媒は、エンジンの空燃比(吸入空気重量/燃料重量)を理論空燃比(14.7)に設定することによって、CO、HC、NOxを同時に浄化します。そのためには、排気管に装着した酸素センサーを使って、空燃比を精度良く制御する必要があります。
三元触媒は、空燃比を理論空燃比近傍に設定すれば、COとHCは酸化反応、NOxは還元反応で有害3成分を同時に浄化できます。
・COの酸化 2CO + O2 → 2CO2
・HCの酸化 4CxHy + (4x + y)O2 → 4xCO2 + 2yH2O
・NOxの還元 2NOx → xO2 + N2
酸素センサーの作動原理
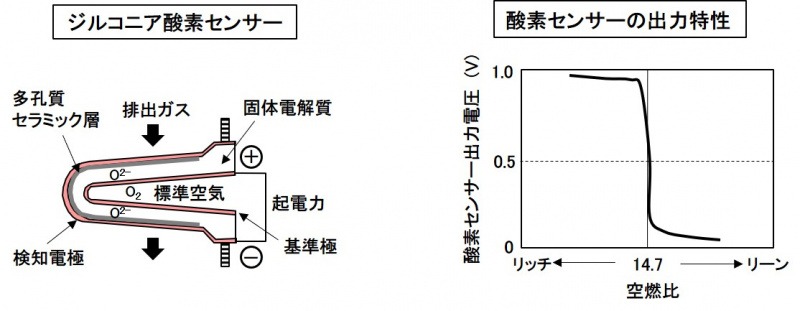
酸素センサーは、排ガス中の酸素濃度を計測する固体電解質型のセンサーで、固体電解質の酸化物ジルコニアの酸素イオン導電性を利用しています。
ジルコニアセラミックの両側面に多孔質電極を設け、片側を大気、もう一方を排気ガスに晒すと、酸素圧差により化学反応を起こし、排気ガス中の酸素濃度に応じて起電力が発生します。
起電力は、理論空燃比を境に出力が急変します。この出力によって、空燃比が理論空燃比に対してリッチ(濃い)かリーン(薄い)かを判定し、燃料噴射量を増減して空燃比を微調整します。
その他のガスセンサー
・空燃比センサー
最近のガソリンエンジンの空燃比制御は、制御精度を上げるため酸素センサーと酸素濃度に対して、リニアにセンサー出力が変化する空燃比(A/F)センサーと併用するシステムが一般的です。
空燃比センサーの基本構成は酸素センサーと類似していますが、酸素センサーの多孔質電極の代わりに排気の拡散を律速する多孔層を組み込んでいます。その他、酸素センサーではほとんど使わなかった大気側の酸素を、空燃比センサーでは未燃成分を酸化するために大気電極側から排気側電極にポンピングします。
・NOxセンサー
検知極にNiO系の材料を用いたジルコニア固体電解質NOxセンサーも実用化されています。
NOの電気化学的還元で発生した酸素イオンのポンプ電流を応答信号とする、電流検出型です。ディーゼルエンジンの排出ガス低減のためや、NOx規制の厳しい市場で採用され始めました。
・PMセンサー
ディーゼルエンジンでは、NOxとPMの同時低減はハードルの高い課題です。
PMセンサーは、瞬時のPM排出量を計測するのではなく、排出ガスの流れの中に挿入した抵抗体に付着したPM量を、抵抗値変化によって計測します。
PM排出の積算量が、規制値を超えたどうかの判断材料として使います。
ガソリンエンジンにとって、三元触媒は画期的な触媒であり、それを有効活用するための酸素センサーや空燃比センサーは重要な役割を果たしています。
厳しい燃費と排ガス規制に適合するためには、精度の高い燃焼制御と排出ガス制御が不可欠であり、今後もガスセンサーの重要性は増すと思われます。
■エアバッグ用加速度センサーとは
加速度センサーは、車両に加わる衝撃や振動、傾きなどを計測できるため用途は広く、特にエアバッグの展開信号のような安全システムや車両運動制御などに多用されています。
高い応答性と信頼性が求められるエアバッグ用の加速度センサーの原理や使用法について、解説していきます。
エアバッグの役割
エアバッグは、衝突時にシートベルトで乗員の姿勢を適正に保ちつつ、瞬時にエアバッグを膨らませて衝撃を吸収して安全を確保します。あくまでも乗員がシートベルトを装着していることが前提で、シートベルトの機能を補助する役割を果たします。
エアバッグは、最初にドライバー保護のために運転席のステアリング内に、続いて助手席のインパネ内に装備されました。さらにサイドエアバッグ用に座席内、カーテンエアバッグ用にルーフライニング内と、より安全性の向上を目指して多くの場所に装備される傾向にあります。
エアバッグの動作原理と制御
衝突時、車両前方に装着された加速度(衝撃検知)センサーとECU内に装着された加速度センサーが衝撃を検出します。応答が速い加速度センサーは局所的な衝撃でも反応してしまうので、衝突の判定はECU内の加速度センサーの情報と合わせて、総合的に判断します。
エアバッグの展開が必要と判断された場合には、点火装置で着火してインフレーター(ガス発生装置)を作動させ、大量のガスを発生させます。
発生したガスは、バッグの中に充満し圧力を上昇させてステアリングカバーを破り展開します。衝突を検知してから、運転席なら0.02~0.03秒、助手席なら0.03~0.04秒後に展開が完了します。

加速度センサー
エアバッグ用加速度センサーには、2つの検出法があります。
半導体の電気抵抗の変化を利用したピエゾ抵抗型と、くし歯電極の可動部と固定部のギャップ変化を静電容量で検出する静電容量型です。
ピエゾ抵抗型式に対する静電容量式のメリットは、温度の影響を受けづらいこと、静電気力を利用し仮想的な加速度を発生させて自己診断の機能を持つことです。
加速度センサーは、エアバッグの他、ABSやESC(横滑り防止)などの安全システムや、車両制御システムで多用されています。
これらのシステムでは、万一加速度センサーが故障すると致命的なトラブルになるので、信頼性の観点から自己診断機能が付加できる静電容量式が、現在は主流になっています。
静電容量式加速度センサーの原理
シリコン基板上に、重りとそれを指示する梁と基板に固定するアンカー部が形成されており、重りにはくし歯電極が設けられています。くし歯電極は重り側から形成されている可動電極と、基板側から形成されている固定電極からなり、双方の電極が対向して静電容量を形成します。
基板水平方向に加速度が加わると、重りが変位します。重りの変位により可動電極と固定電極の間隔が変わり、静電容量が変化して加速度が検出されます。

エアバッグ用加速度センサーのような安全装置システムに使われるセンサーには、高い応答性と信頼性、耐久性などが求められます。
エアバッグは交通事故が発生した際には、ドライバーと乗員の命を守ってくれる最後の砦となるので、加速度センサーの役割は重要です。
■回転速度センサーとは
車は、エンジンの回転を動力として、最終的にはタイヤが回転して動きます。そのため、車を制御するためには、様々な回転体の回転速度や回転角を、精度良く計測する必要があります。
エンジンや車両の制御に使用されている回転速度センサーMR(磁気抵抗素子)の原理と適用例について、解説していきます。
回転速度を計測する磁気センサー
車の様々な回転制御に使われているのは、回転速度や回転角を検出する非接触の磁気センサーです。
磁気センサーは、エンジンのクランクシャフト回転速度や車両のABS(アンチロック・ブレーキシステム)の車輪速の計測などに採用される場合と、スロットル開度やステアリングの舵角などの回転角の計測に採用される場合があります。
代表的な磁気センサーとしては、電磁ピックアップやホールセンサーがあります。
電磁ピックアップは、磁石に誘導コイルを取り付けたセンサーで、ギヤの回転で発生する山谷の波形の数から回転速度を計測します。ホールセンサーは、磁界の強さを電圧に変換してローターの回転角を検出する方法ですが、いずれもノイズに弱く、対策のためにコストが上昇します。
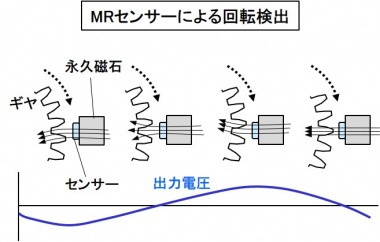
MR(磁気抵抗素子)センサー
MRセンサーは、電磁ピックアップとホールセンサーの欠点を解消し、回転速度と回転角の両方を検出できるセンサーです。
ギヤの回転速度を検出する場合は、ギヤの歯とセンサーの距離が短くなる方向に磁界が働くので、ギヤの回転によって磁界の方向が変化します。磁界の方向によって電圧が変化することから、発生電圧を信号処理してカウントすることによって、回転速度が求められます。
磁界の強さを検出するホールセンサーと比べて、機械的な影響を受けづらく温度変化にも強いという特長があります。さらに、検出用の磁気回路が簡単なのでシステムコストを抑えることができ、ホールセンサーからの置き換えが進んでいます。
MRセンサーの適用例
・回転速度センサー:ABS(アンチロック・ブレーキシステム)
ABSは、各タイヤのグリップ力を適正に保つことによって、コーナリングフォースの低下を防ぎ、操舵性と最適な制動力を実現するシステムです。急ブレーキや滑りやすい路面の制動で生じるタイヤロックを防止して、適切な制動力を発生させます。
ABSを発揮させるためには、各車輪の回転数差からスリップ状態を検知する必要があります。車輪と連動するギヤローターにMRセンサーを組み込んで各車輪の回転速度差を検出して、制動力を制御します。
・回転角センサー:ステアリング操舵角
ステアリングの回転角度検出としては、従来は光学式が使われていました。回転するディスクの円周上にスリットを設けて、スリットに対応した回転情報をフォトカプラによって計測します。しかし、光学式は絶対角の検出ができず、精度が高くないという課題がありました。
MRセンサーの場合は、ステアリングシャフトにメインギヤを設け、その回転と連動する検出ギヤの回転角をMRセンサーで検出します。MRセンサーを適用することによって、絶対角と分解能の高い検出ができます。
・その他
エンジンのクランクシャフトとカムシャフトの回転速度、スロットル開度、ワイパーの開度、ミラーの向き、ヘッドランプの向きなど、多くの回転速度と回転角の検出にMRセンサーが採用され始めています。
車の電子化やバイワイヤ化(センサーとアクチュエーターを機械的でなく、電気的に連結)が進む中、車載センサー自体の高精度化が要求されます。
回転速度や回転角の検出が、電磁ピックアップやホールセンサーから、精度の高いMRセンサーへと置き換わるのも必然的な流れかもしれません。
■ジャイロセンサーとは
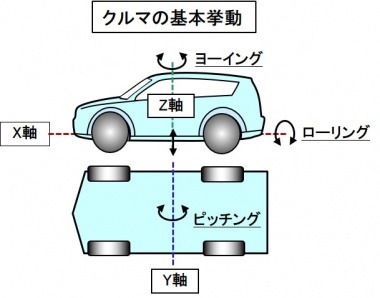
ジャイロセンサーは、車両の複雑な回転挙動ヨーイングやピッチング、ローリングなどを検出して、車両姿勢の制御に使われます。またカーナビでは、車の進路方向の変化を検出して、自車位置特定の補完に使用されます。
回転角を計測するジャイロセンサーの計測原理と適用例について、解説していきます。
車両制御用のジャイロセンサー
回転角速度(角度/s)を計測するジャイロセンサーは、車両制御用とカーナビ用の2つの用途に使われています。
車両制御用のジャイロセンサーは、車両が急ハンドルやスリップなどで不安定になった場合に車の挙動を検知して、姿勢を安定させるように制動力を制御します。
車の代表的な回転挙動には、「ヨーイング(左右方向)」と「ピッチング(前後方向)」、「ローリング(上下方向)」がありますが、ジャイロセンサーは主としてヨーイングの検出に使われます。
例えば、ESC(横滑り防止装置)では、ステアリングホイールの切れ角とヨーの値を比較して、車の挙動を判定します。ステアリングホイールの切れ角に対して、車に大きなヨーレートが発生している場合は、横滑りが発生したと判断します。
車両を安定させるために、ESCコントローラーが4輪それぞれ個別に制動力をかけて車両の姿勢を安定させます。
カーナビ用のジャイロセンサー
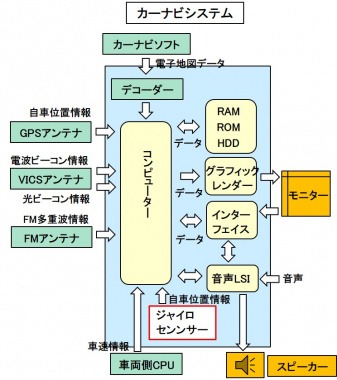
カーナビの自車位置の確認のためには、「GPS(全地球測位システム)」は欠かせません。GPSは、軍事用目的の測位精度は20cm未満ですが、民生用途の精度は約10mです。
また、トンネルやビル群などの障害物によって、GPS電波が途絶えた瞬間、位置情報が消えてしまいます。そこでカーナビでは、GPSと「自立航法」を組み合わせて常に測位を行います。
自立航法とは、車速センサーで移動距離を、ジャイロセンサーで進路方向を求めて自車位置を決める手法です。
例えば、トンネル内に分岐点がある場合でも、ジャイロセンサーを用いてどちらに進んだか把握できます。
ジャイロセンサーの回転角検出原理
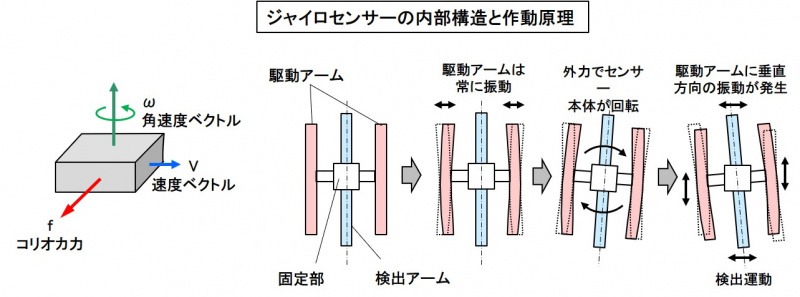
ジャイロセンサーは、センサー本体の回転量を電気信号に変換することで角速度を計測します。車載用としては、センサー内部の振動を利用するジャイロセンサーが使われます。
センサーに外から回転力が加わると、センサー内の振動する部位には垂直方向に「コリオリの力」が発生します。コリオリの力は、センサー内に新たな振動を発生させ、この振動から角速度を求めることができます。
水晶を素子としたダブルT型構造の検出例を以下に示します。センサー本体は、駆動アーム、固定部、検出アームで構成されます。
・通常時は、駆動アームの横に電界を連続的に発生させることで、駆動アームを一定方向に振動させます。
・ジャイロセンサー本体に回転力が働き、回転します。
・振動する駆動アームが回転することで、駆動アームにコリオリの力が働き、垂直方向の振動が発生します。
・駆動アームが垂直方向に振動することで、検出アームが左右に振動します。この振動を磁界センサーで検出して、電気信号に変換します。
ジャイロセンサーを有効に活用すれば、車の挙動を検出して高いレベルの乗り心地を実現できます。また、道路や運転状況に応じた車両制御によって乗り心地を自由に設定できるので、好みの乗り心地を自動または手動スイッチで選択することも可能です。
■超音波センサーとは
超音波センサーは、電波や光波に比べて波長が短く、近距離の検出分解能が高いセンサーです。その特長を生かして、バックソナーやコーナーソナー、AT誤発進抑制制御、自動駐車用など用途は多岐にわたります。
低コストで扱いやすい超音波センサーについて、解説していきます。
超音波センサーの原理
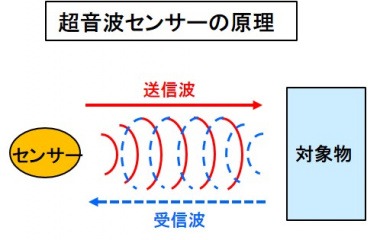
超音波センサーは、対象物にパルス状の超音波を発射して、反射して戻ってくるまでの時間から距離を計測する装置で、ソナーとも呼ばれます。超音波は、犬やこうもりには聞こえますが、人間の耳には聞こえない20kHz以上の周波数の音波です。
超音波の発信・受信は、圧電素子の圧電効果を利用します。
圧電素子は、電圧を印加すると超音波を発生し、超音波を受けると起電力を発生する特性があります。この原理を利用して、電気信号を超音波に変換して対象物に発射し、対象物によって反射してきた反射波を電気信号に戻して、対象物の有無や距離を計測します。
L = t/2 × C (L:距離、t:送信してから反射してくる時間、C:超音波の音速340m/s)
非接触かつ小型で対象物の材質を選ばないので、バンパーなどに埋め込んで障害物との隙間を検出するセンサーとして活用されています。一般的な使い方は、車両後方の隙間を計測するバックソナーや、四隅との間隔を計測するコーナーソナーなどで、駐車時に障害物の距離が一定以下になると警告音で知らせます。
超音波センサーの応用例として、自動駐車やAT誤発進制御について以下で紹介します。
自動駐車における音波センサーの役目
自動駐車のために必要なセンサーは、一般的には超音波センサーとカメラです。
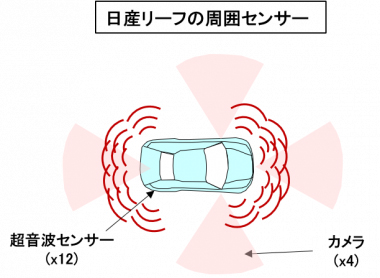
駐車のスペースを検知するために、車両の前後と四隅のバンパーに超音波センサーを埋め込みます。超音波センサーによって、夜間や悪天候でも障害物を検知でき、距離が認識できます。画像として認識できるカメラは、白線や駐車枠を認識し、移動物体を検知するために必要です。
2017年発売の日産・リーフの自動駐車システム「プロパイロット・パーキング」では、車両周辺に12個の超音波センサーと4つの高性能カメラによって、周辺状況を認識しながら自動駐車を実現しています。
起動スイッチを押せば、駐車可能なスペースを検出して、ステアリングとアクセル、ブレーキ、シフトを自動制御して、並列・縦列駐車、前向き駐車、後向き駐車をしてくれます。
AT誤発進(ペダル踏み間違い)抑制制御での超音波センサーの役目
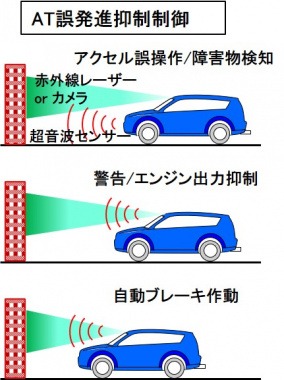
すべてのメーカーは、アクセルとブレーキの踏み間違い事故防止のため、AT誤発進抑制制御を採用しています。誤発進抑制制御のためには、車両の前方または後方の障害物を正確に認識する必要があります。障害物の検知手法はメーカーによって異なりますが、超音波センサーか赤外線レーザーが多用されています。
AT誤発進抑制制御は、一般的には以下のように作動します。
駐車操作など停止または車速約10km/h以下の低速走行時、進行方向に建物や壁などの障害物を検出した場合にアクセルを一定以上強く踏み込んだときに、制御が作動します。
・警報とともに自動的にエンジンの出力を抑え、急発進や急加速を抑制します。
・さらに障害物に接近すると、自動ブレーキが作動します。
近距離の障害物の検出法としては、超音波センサーの他にも赤外線レーザーやカメラがあります。それぞれ一長一短ありますが、超音波センサーはもっとも小型安価で使い易いですが、検出距離が2m程度までの近距離しか対応できないという使用制限があります。
超音波センサーは低コストで利便性が高いので、近接障害物の衝突回避のために急速に普及しています。自動運転や自動駐車では必要不可欠なセンサーですが、安全のため一般の車でも前後左右に10個以上装着している車も珍しくありません。
■車載カメラとは
車載カメラは、バックモニターのように死角を補うビューカメラの役目だけでなく、周辺の車両や障害物を画像データとして検出して、車の制御や運転支援に利用されています。
運転支援や自動運転のためにレーダーなどとともに活用されている車載カメラについて、解説していきます。
車載カメラの撮像素子
撮像素子は、レンズを通した光をデジタル信号(画像)に変換する装置で、人間で言えば網膜に相当します。一般的なデジカメには、撮像素子として「CCD」か、「CMOS」が使われています。
CCD(Charged Couples Device)は、各々のピクセル(画素)の電荷は隣接するピクセルに一斉に転送され、これを電荷-電圧変換アンプでデジタル変換して出力します。ノイズが少なく画質が良く、小型化しやすいため、小型カメラや動画などに使われています。
一方、CMOS(Complementary Metal Oxide Semiconductor)では、ピクセル内の変換アンプによってピクセルごとにデジタル変化して出力します。安価で、バッテリ消費が少ないメリットがあります。
モニターとして利用される場合は、CCDより安価なCMOSが主に使われ、画像認識には高画質のCCDが向いています。
運転支援における車載カメラの役割
車載カメラは、当初はバックモニターなどドライバーの死角を補うビューカメラとして使われました。最近は、運転支援技術でレーダーやレーザーレーダーと同様、車周辺の障害物や他車を検出するセンサーとしての役割を担うようになりました。
車載カメラの活用例としては、以下の通りです。
ただし、多くはカメラ単独でなく、レーダーやレーザーレ-ダーなどのセンシング技術と組み合わせて機能します。
・前方障害物や先行車の検出、AEB(衝突被害軽減ブレーキ)
・車線認識による車線逸脱警報LDW(レーンキープ・ウォーニング)、車線維持支援LKA(レーンキープ・アシスト)
・歩行者検知、衝突警報
・速度表示などの道路標識の認識
・居眠りやわき見運転など検知のためのドライバーモニタリング
カメラを利用した車間距離の計測
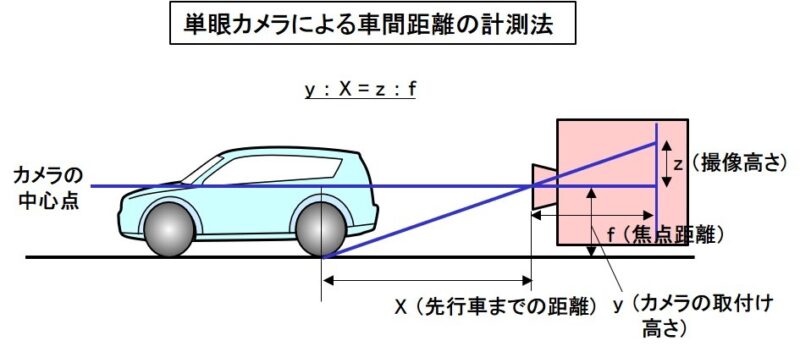
・単眼カメラ方式
1台のカメラで先行車までの距離Xは、画像座標の縦方向のピクセル位置から算出します。
x=f×y/z
f:カメラの焦点距離、y:カメラの取付け高さ、z:撮像画面上のタイヤと路面の接点からカメラの中心点までの投影高さ
単眼による距離計測は、低コストで設置場所の自由度が高いメリットがありますが、誤差が大きいという課題がありました。
しかし、日産の運転支援「プロパイロット」システムでは、モービルアイ製の高度な画像処理技術によって、単眼カメラだけで精度良く車周辺の障害物や先行車を認識できています。
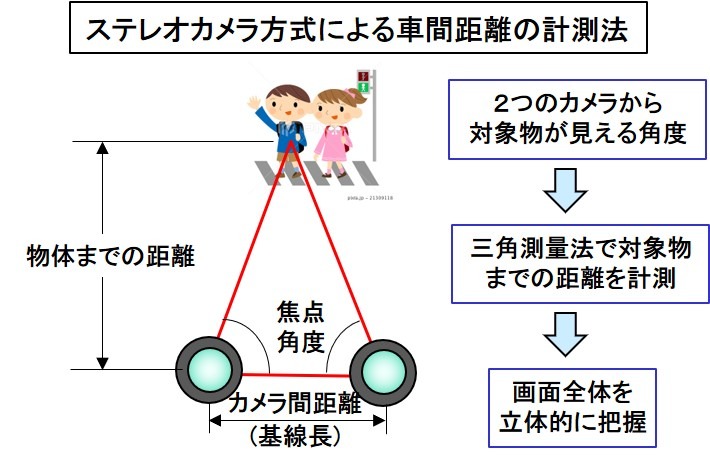
・ステレオカメラ方式
カメラを2台搭載して対象物を認識する、SUBARU(スバル)のアイサイトが採用している手法です。ステレオカメラ方式は、人間の眼のように視差によって精度の高い距離の計測ができます。
特に奥行き情報を正確に捉え、3次元認識ができるので、歩行者や自転車、車両などのあらゆる対象物を認識でき、距離や位置を計測できるのが最大の特長です。
ステレオカメラ方式による対象物までの距離計測は、対象物を2台のカメラで撮像した撮像位置の差分(視差)を利用した「三角測量」の原理に基づいています。
車載カメラには、「映す」という機能だけでなく、現在は「測る」という機能が重要視されています。測るためには、カメラで撮影した映像を画像処理して数値に置き換える技術が必要です。
白線認識や衝突回避に加えて、対象物を3次元で捉えられる特徴を生かして道路標識の認識やドライバーのモニタリングなど今後も画像センサーの進化が期待されています。
■ミリ波レーダーとは
予防安全の基本は、自車の周辺を監視していち早く先行車両や障害物を察知することです。検知するセンサーとしては、主としてミリ波レーダーやカメラ、レーザーレーダーなどが使われます。
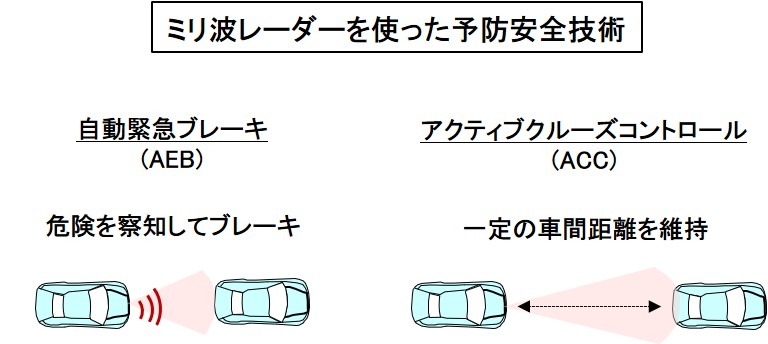
AEB(自動緊急ブレーキ)やACC(車間距離制御装置/アクティブ・クルーズコントロール)に採用され、先行車両を検知して車間距離を計測するミリ波レーダーの特徴や原理について、解説していきます。
ミリ波レーダーの特徴
車両周辺を監視するセンサーとしては、ミリ波レーダーの他にもカメラ、レーザーレーダー、超音波センサーが実用化されています。
カメラでは距離計測は難しく、一般的にはカメラを2つ使ったステレオ方式にする必要があります。レーザーレーダーは直進性と分解能に優れますが、雨や霧などの悪条件に弱いのです。超音波センサーは、低コストながら数m程度の計測距離しか対応できません。
ミリ波レーダーは、周波数30GHz~300GHz(波長1mm~1cm)の電波で、光に近い周波数帯を有します。直進性が強く、雨や霧、雪といった耐環境性に優れています。
一方で、形やサイズなどの詳細な識別はできず、歩行者のように電波を吸収しやすい対象物は検知できません。
AEB、ACCへの適用
一般的な76GHzのミリ波レーダーは、前方100m~200m程度の車両や障害物を、分解能1m~2m、視野角20度程度で検知できます。したがって、AEB(自動緊急ブレーキ)やACC(車間距離制御装置)のための長距離検知用センサーとして使われています。
ただし、中短距離では検知精度が低下し、歩行者検知ができない課題があるため、中短距離計測ではステレオ式カメラやレーザーレーダーを併用します。
最近は、24GHzを使った中短距離用の準ミリ波レーダーも使われ始めました。
ミリ波レーダーの構成と計測原理
レーダーの基本的な原理は、対象物に電波を放射して、その反射波を計測することによって距離や方向を検知します。
ミリ波レーダーとしては、パルスレーダー方式と連続波CW方式、周波数変調を利用したFM-CW方式があります。
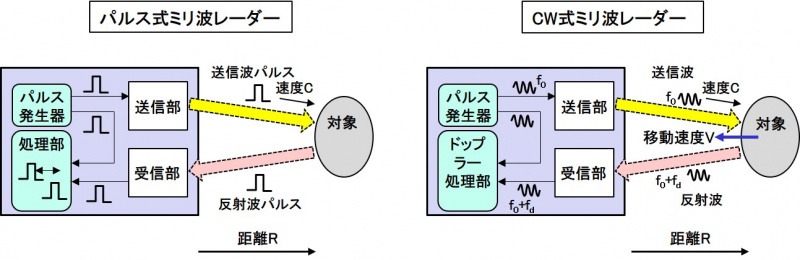
・パルス方式
送信パルス信号を計測対象に向けて放射し、計測対象から反射して返ってくる反射波パルスを受信します。
発信パルスと反射パルスの時間差ΔTを計測すれば、計測対象までの距離Rはその時間差から以下のように表されます。また速度は、送信波と反射波の周波数差から求めます。
R = C×ΔT/2 (Cは波動の伝播速度、電波や光波の電磁波では速度は約3×108m/s)
・CW(Continuous Wave)方式
連続波を送信する方式で、対象物の相対的な移動速度を計測するのに適しています。
周波数f0の送信波は、移動速度Vで移動する対象によってドップラー効果を受け、反射波ではその周波数がf0+fdと変化して受信されます。そのドップラー周波数fdを使って、相対的な移動速度は以下のように表されます。
V=C×fd/2f0
・FM(Frequency Modulation)-CW方式
FM-CW方式は、送信波を周波数変調して放射し、比較的少ない信号処理で高い分解能が得られるのが特長です。
対象物に反射して受信される信号の周波数は、距離による時間の遅れと速度差によるドップラーシフトの成分を含み、これと送信波の差分を取れば、距離と速度が求められます。
予防安全のためのセンサー技術の中で中心的な役割を果たすミリ波レーダーは、日々進化しています。
現在注目されているのは、より優れた検知能力を持つ79GHzレーダーです。現行の76GHzレーダーに比べて、高い分解能を持ち中短距離の計測ができます。さらに、歩行者や自転車などの対象物の検知も可能になるので、急速に開発が進み普及し始めました。
■赤外線イメージセンサーとは
夜間運転は、視界が悪く対向車の眩惑などもあり、事故の発生確率が高くなります。赤外線イメージセンサーは、このような夜間運転の問題を解決して安全性を高める技術として注目され、すでに複数のメーカーがナイトビジョンシステムとして採用しています。
今後採用が期待される赤外線イメージセンサーについて、解説していきます。
赤外線イメージセンサーの特長と用途
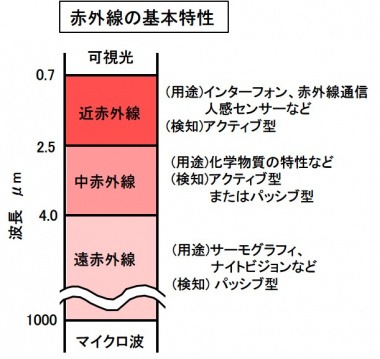
赤外線は、可視光よりも波長が長く、人間の目では見ることができない光です。波長によって、近赤外線、中赤外線、遠赤外線があり、例えばサーモグラフィやナイトビジョンは遠赤外線、化学物質の特定は中赤外線、インターフォンや監視カメラの撮像は近赤外線を使っています。
可視光と比べると、照明が不要(暗くても見える)、温度情報が得られる、煙や霧を透過しやすいなどのメリットがあります。
赤外線を使ったセンシングとしては、アクティブ型とパッシブ型の2種に大別できます。
・アクティブ型は、対象物に赤外線を照射して、対象物からの反射光を受光して対象物を検出します。
・パッシブ型は、測定対象の反射光や自ら発する光を検出します。また、物体から放射される赤外線エネルギーの熱を、熱電対の原理で電圧に変換して温度を計測できます。
可視光を使ったセンシングでは、ほとんどの対象物が可視光を発しないため光源の特定ができません。
自動車用への赤外線の活用例として、夜間撮像システム、車両周囲モニター、エアコンシステムについて以下に紹介します。
夜間撮像(ナイトビジョン)システム
自動車へもっとも早く適用、実用化された赤外線技術は、夜間撮像システムです。人や動物など熱を発する物体や見えにくい物体を映像化して、ヘッドアップや液晶パネルに映し出します。
遠赤外線を用いたパッシブ型は、歩行者などからの放射を直接検出するので、ライト(照明)が不要です。
一方、近赤外線を利用するアクティブ型は、専用の近赤外線ライトで前方を照射し、その反射光を近赤外線カメラで撮影します。
遠赤外線方式はGMやホンダ、BMWが、近赤外線式はトヨタが実用化しています。
現在、欧州と日本ではNCAP(自動車アセスメント)で夜間歩行者を対象とした自動ブレーキの評価が行われており、特に欧州車ではナイトビジョンシステムを積極的に採用しています。
車両周囲モニター
日産は、先進安全のデモ車で車両4隅に搭載した赤外線カメラによって、死角の歩行者を検知して、発進時に歩行者がいる場合は警報とともに、発進を抑止するシステムを開発しています。
4台の赤外線カメラは、車両停止時に取得した画像と発進時の画像を比較して、既定の温度および大きさの熱源を検知した場合には、その熱源を歩行者として認識します。
また、赤外線検知機能付きリアビューカメラで合成表示することによって、死角内の歩行者をより分かりやすく表示することも提案されています。
エアコンシステム
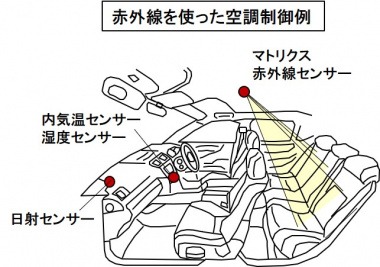
車室内の乗員や内装表面から放射される遠赤外線を受光して温度を計測し、空調制御に利用するシステムが、一部車種で採用されています。
トヨタ・レクサスなどの高級車では、同時に6箇所の温度を計測できるマトリクス赤外線センサーを使って、後席各乗員の温感を察知して最適制御しています。
欧州と日本のNCAP(自動車アセスメント)では、夜間歩行者を対象とした自動ブレーキの評価が実施され始め、夜間の安全性向上が現在の大きな課題となっています。
こうした状況を背景に赤外線イメージセンサーは、「新しい目」のセンシング技術として注目されています。
■LiDARとは
現在、自動車メーカーが目標としている条件付き自動運転レベル3以上では、短波長の赤外線レーザーを利用するLiDAR(ライダー)の採用が不可欠です。LiDARは、周辺の車両や障害物までの距離や位置、形状を精度良く3次元計測できることが、最大の特長です。
完全自動運転車用として注目されているLiDARの機能と必要性について、紹介していきます。
LiDAR(レーザーレーダー/ライダー)
レーダーとは電波のことではなく、電波を放射してその反射波の到達時間や方向および強度によって、計測対象までの距離や方向を計測するためのシステムや装置を指します。
LiDARは「Laser Imaging Detection and Ranging(レーザー画像検出と測距)」の略称で、レーダーと同じような原理ですが、空間を伝播する波動として電波でなく、レーザーなどの光波を用いたものです。レーダーの電波を光波に置き換えたもので、レーザーレーダーとも呼ばれます。
一般にはレーザー光をパルス状に照射し、対象物から反射して跳ね返ってくる時間から距離や位置、形状まで計測できるセンサーです。
LiDARの特徴
通常LiDARは、波長の短い赤外線を用いるので、反射率が低い対象物、小さな対象物でも十分な反射波を受信できるので、高い精度で対象物の検出ができます。
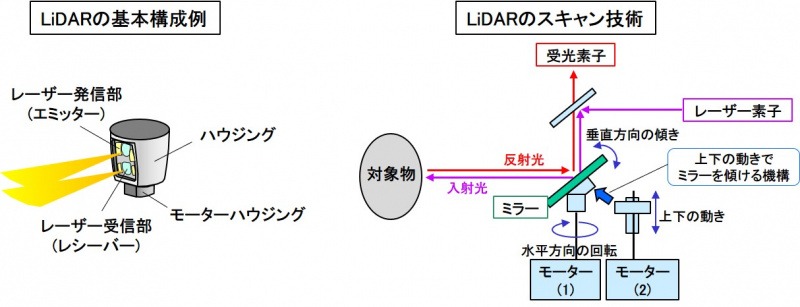
車載用LiDARの最大の特長は、レーザーを水平方向および垂直方向にスイープして全周囲(または広範囲)の対象物を3次元計測することです。
レーザーをスイープするためには、発信部本体か、反射ミラーをモーターで回転させる機構が必要です。回転機構がコストアップの要因になっているので、最近はレーザー光自体を制御してスイープさせるメカレスLiDARも開発されています。
LiDARの必要性
高速道路であれば、車線を維持するLKAS(車線維持システム)や自動で車線変更を行うLCS(車線変更システム)などの部分自動運転レベル2は、現行の「ミリ波レーダー+カメラ」の組み合わせで対応でき、すでに実用化されています。
一方で一般路での自動運転を見据えると、より精度の高いLiDARの採用が必須です。必要な理由は、以下の通りです。
・自車位置を特定するためのGPS情報の誤差(10m程度)は、障害物がなくスムーズに流れる高速道路では問題となりません。しかし、一般路の複雑な交通状況ではGPSの誤差は許容できず、また障害物によってGPS信号が受信できない頻度も増えます。
・ミリ波レーダーやカメラでは、周囲との正確な距離が把握できません。一般道路では、複雑な道路や狭い路地などを走行する頻度が高まるので、数cmの精度で距離が計測できるLiDARが不可欠です。
LiDARを使った完全自動運転車の例
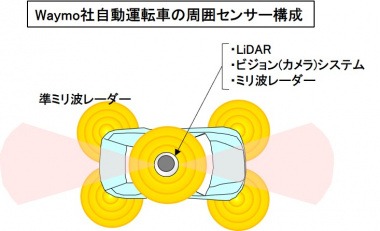
Waymo社(Google社の自動運転開発の子会社)の実験車は、ルーフの小型ドームにLiDARとカメラのビジョンシステム、ミリ波レーダーを格納し、車の左右前後4隅には準ミリ波(短距離)レーダーを装備しています。
小型ドームのLiDARで全方位を3次元で把握します。ビジョンシステムは、ダイナミックレンジの広いカメラの集合体で周囲360度を監視し、さらにミリ波レーダーで遠方の障害物を検出します。
また車の4隅の準ミリ波レーダーは、車の近くの人や自転車などを把握します。
自動運転におけるセンサーの「3種の神器」は、カメラとミリ波レーダー、LiDARです。カメラとミリ波レーダーは、性能向上を図りながら着実に低コストを実現し、多くの車に搭載されています。
一方、LiDARのコストは2020年頃でも300ドル前後(目標100ドル)であり、2020年頃にはLiDAR搭載車が出現しそうですが、一気に量産展開となるのは難しいと予想されています。
■ドライバーモニタリングとは
レーダーなど、各種センシング技術を駆使した運転支援技術や自動運転技術の採用が急速に進んでいます。これらと並行して開発が進められているのが、運転中のドライバーの意識状態(レベル)を検知、監視するモニタリング技術です。
居眠りやわき見運転などを検知するドライバーモニタリング技術について、解説していきます。
ドライバーモニタリングの必要性
ドライバーの意識状態、すなわちドライバーが運転に集中している状態かどうかを推定するモニタリング技術が注目され、実用化され始めました。その狙いは、2つあります。
・ドライバー自身の不注意による事故の防止
危険察知の遅れや判断ミスなど、事故直前のドライバーの状態が不適切であったことに起因する事故は多いです。ドライバーが適切に運転できる状態かを常に監視して、不適切な状態であれば、ドライバーへ注意を促して事故を防止します。
・自動運転 (レベル2)中にドライバーが運転に集中しているか監視
現時点の自動運転の主流である「自動運転レベル2」では、運転環境の変化や何らかの問題によって、自動運転から自力運転へ切り替える急な要請が起こります。そのような場合に備えて、ドライバーは自力運転に即座に戻れる状態であることが求められ、そのためにドライバー状態の監視が必要です。
モニタリング手法
ドライバー状態のモニタリング手法としては、視線や顔の向き、姿勢を検知するカメラシステム、心拍を検知するハンドルセンサー、脈拍を検知するシートセンサーなどがあります。
一般的には、トヨタやスバルなどがすでに実用化している赤外線カメラを使った顔認識によるモニタリング手法が主流です。ドライバーを赤外線カメラで撮影して、居眠りやわき見運転を検知する手法です。
赤外線カメラは、ステアリングコラムやダッシュボードに装着した例もありますが、視野確保のためにはルームミラーに赤外照明とともに装着するのが、もっとも精度が高く一般的です。
画像処理と解析法
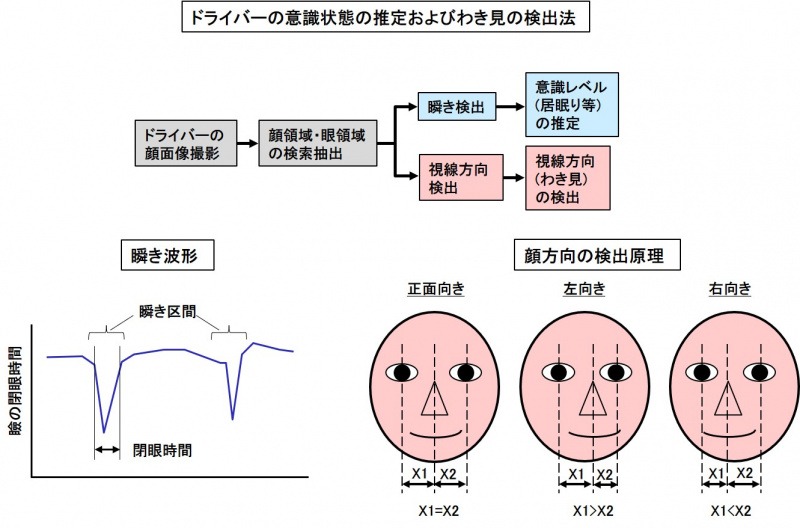
カメラによるモニタリングでは、ドライバーの顔画像をリアルタイムに処理して意識レベルを推定します。意識レベル、眠気の推定は顔画像の眼の瞬きから推定し、わき見は顔の向きなどの情報から検出します。
・瞬きの検出による意識レベルの推定
瞬きの検出は、眼領域を抽出した画像から、黒眼を中心とした上下瞼の動きを検出します。開眼時は上下瞼の間隔は大きく、瞬きを始めると開度は徐々に小さくなって閉眼します。
この瞬き時に発生する下向きの部分を瞬き区間とし、その幅を閉眼時間として算出します。
瞬き区間と閉眼時期から、意識レベルの低下や眠気、居眠り状態を推定します。
・わき見検知の検出
運転中のドライバーの視線を正しく検出するためには、顔の方向と目の方向を分離して検出する必要があります。
顔方向とその角度は、鼻の重心点と両眼の重心点間の距離によって、眼球の方向は眼頭と瞳孔の重心点との相対距離より算出します。
現在、各社が進めている「自動運転レベル2」では、あくまでも運転についてはドライバーに責任があるため、ドライバーの状態を監視するモニタリング技術は不可欠です。
また、車室空間の快適性向上のためにも、ドライバーの状態を検出することは重要です。ドライバーの体調や集中力などを先読みして、空調などを制御することが期待できます。
(Mr.ソラン)