






目次
■人に代わってクルマが運転するために不可欠
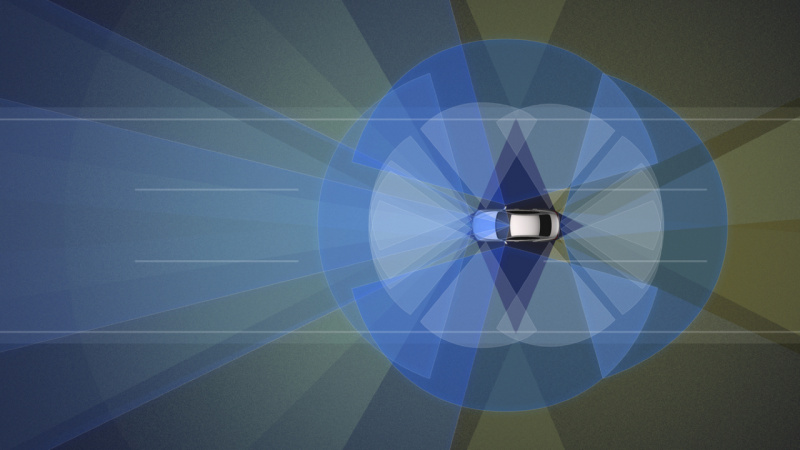
開発が進むクルマの自動運転で欠かせないのがセンサー類です。クルマがドライバーに代わって運転操作を行う(制御する)には、人間に例えれば目などの代わりをするものが必要だからです。センサー類には様々なタイプがありますが、中でもよく耳にし、特に重要とされているのがカメラやミリ波レーダー、LiDAR(ライダー)。これらは一体どういったもので、どんな役割をするのでしょうか。

●カメラの画像をAIが画像認識
人の目の代わりをするという意味で、最もイメージしやすいのがカメラでしょう。現在でも、自動ブレーキ(衝突被害軽減ブレーキ)の制御などのために、ルームミラーの裏側などにカメラが装備されている車種も増えてきました。

そして、さらに自動運転の技術が進み、クルマがブレーキだけでなく、その他すべての操作を行うためには、カメラが担う役割はより広範囲になってくるといわれています。特に、今注目されているのが、カメラからの情報をAI(人工知能)が画像認識を行い、周囲の物体や歩行者、信号や標識などの認識、道の白線の検出などを行うというもの。まさに人が目などで収集して能で判断する情報処理を、システムで行うことが期待されています。
カメラは、以前は単眼タイプが使われていましたが、現在では対象を異なる複数の方向から撮影できるステレオカメラが主流になってきています。これにより、走行するクルマ前方にあるクルマや建物、人などの大きさや自車との距離、速度などが計算できるようになります。

ただし、カメラも万能ではありません。例えば、直射日光や夜間に対向車のヘッドライトを浴びた場合は、画像が真っ白になる白飛びという現象が起こることがあります。そうなると正確な情報が収集できなくなるため、自動運転の実験車などは、他のセンサー類と組み合わせていることが一般的です。
●周囲の物体などを検知するLiDAR
LiDARは、英語の「Light detection and ranging(光検知と測距)」の略です。赤外線などのレーザー光を飛ばし、前方や周囲の物体に当たって戻ってきた光を受光器で受け取ることで、その時の時間差から距離を測るといった役割をします。
従来の2Dタイプでは、水平面だけの計測を行っているものが多かったのですが、近年では3Dタイプが出てきて、いくつかの水平面を一度に計測することが可能となりました。これにより、周辺の物体までの距離だけでなく、そのアウトラインを計測することが可能となっています。例えば、歩行者や自転車、他の車両などの区別ができるのです。
また、自動運転では、走行中に自分のクルマの位置を推定するために、3D高精度マップという道路の形状や分岐点、白線などを記録した詳細な地図が使われることも多いのですが、実際にはこのマップとLiDARなどの情報を組み合わせることで、より正確でリアルタイムの情報を取得することを可能にしています。
ちなみに、LiDARはすでにアウディA8に装着されており、人の代わりにクルマが運転を制御する自動運転レベル3(緊急時などではドライバーが運転を代わる必要あり)を可能にしています。最も、現在は法規上の問題などでその機能は封印されていますので悪しからず。

●電波を発射して距離を測るミリ派レーダー
ミリ派レーダーも、すでに市販車では、前車追従などADAS(先進安全運転支援システム)のために採用されているものです。ミリ波とは周波数帯が30GHz〜300GHzという、非常に高周波の電磁波のこと。前述のLiDARのように電波を送信アンテナから物体へ飛ばし、反射して受信アンテナに戻ってくるまでの時間差で対象物との距離を測るために使われます。
ミリ派レーダーは、非常に直線性が強い電波を出し、雨や雪など悪天候の状況下でも、影響を受けにくい特性があります。光を飛ばすLiDARや光により画像を撮影するカメラは、トンネル出入口や夜間に対向車のヘッドライトが当たるなど、明るさが急激に変化する状況で影響を受けやすいデメリットがあります。そこで、そういった光の影響を受けにくいミリ派レーダーを使うことで、カメラやLiDARの機能を補完するセンサーとしての活用が期待されています。
センサーには、ほかにも対象物の有無や対象物までの距離を計る超音波センサーや、位置情報を取得するGPSセンサーなど、様々なタイプがあります。日進月歩が続く自動運転の技術開発では、現在いろんな可能性を探りつつ、新しいセンサーの開発も進められているのです。
(文:平塚直樹/写真:SUBARU、日産自動車、アウディジャパン *写真は全てイメージです)


