



目次
●高精度な地図データは作成に時間がかかる
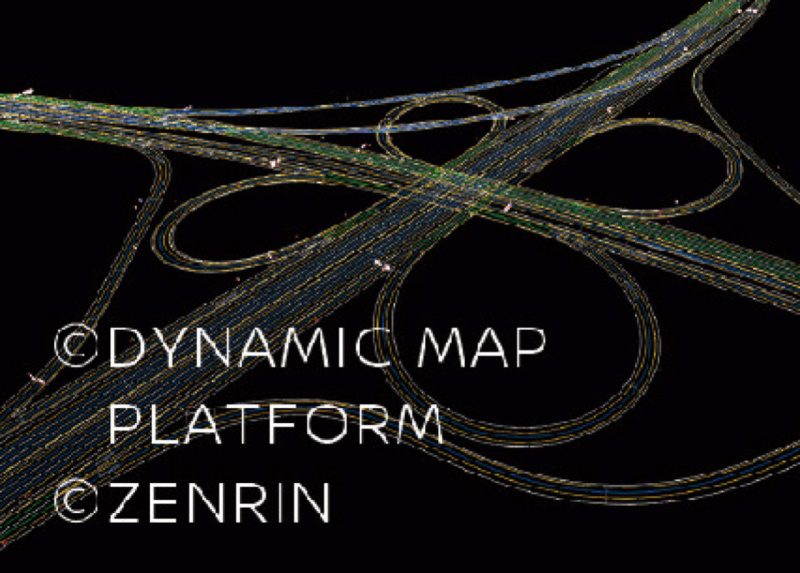
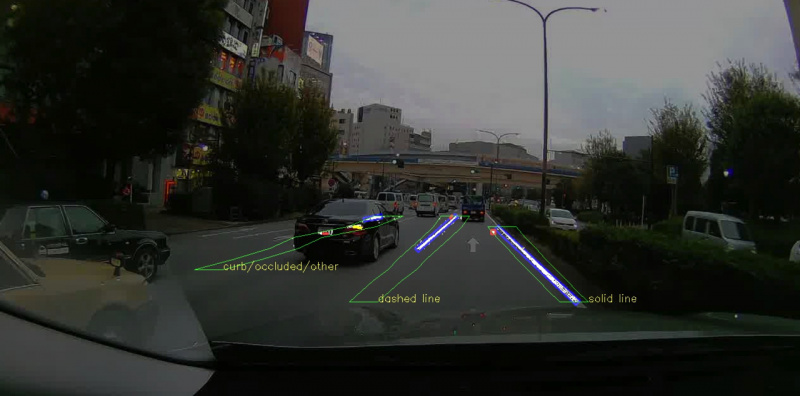
ところが、世界中の道をカバーする高精度な地図データの制作はなかなか進みません。それは、3D高精度マップの情報は、物体を検知するLiDAR(ライダー)とよばれるレーザーセンサーや車載カメラなどをクルマに搭載し、走行しながら収集するため時間と手間が掛かるからです。
前述のTRI-ADが、2019年2月に米CARMERA社との実証実験を行う際に発表した調査結果によると、自動運転に必要な高精度の地図は「現在、高速道路の地図作成が進んでいますが、そのカバー率は全世界の道路ネットワークの1%未満」といわれています。
そのため、同社では、高速道路以外の地図作成を課題とし、東京の市街地でカメラを搭載したクルマを走行させ道路の情報を取得、そのデータをもとに高精度地図を自動生成する実験を行っています。
世界の主要な国や道路で自動運転車を走らせるには、その安全な自律走行をするために必要な3D高精度マップも世界中の道を網羅する必要があります。ところが、TRI-ADの例を見ても分かる通り、その作成はまだ始まったばかり。世界の道を網羅するにはまだまだ時間がかかるのです。

●3D高精度マップを使わないシステムも登場
コストの問題もあります。前述の日産とBMWの手放し運転機能は、日産ではスカイラインの中でも価格が高い上級グレードのハイブリッドモデルにのみ搭載。一方、BMWは、3シリーズや8シリーズ、X7などより多くの車種に搭載しています。
おそらく、BMWは3D高精度マップの採用を見送ることで、販売価格を抑えると共に幅広い車種に採用、これらにより手放し運転機能の普及を目指すといった戦略なのでしょう。

また、最近では3D高精度マップを使わないシステムも開発されています。例えば、三菱電機では、「ローカルマップ」というデータを使い、高精度な地図情報が整備されていない場所でも自動運転ができる新技術を2019年に発表しました。
従来、同社は日本が打ち上げた人工衛星「みちびき」などを利用する準天頂衛システムからのセンチメータ級測位補強サービス「CLAS信号」で自車位置を特定しながら、3D高精度マップを活用する自動運転システムを開発。日本国内で実証実験を行って来ました。
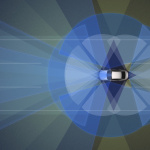
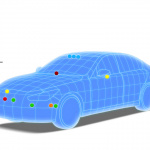
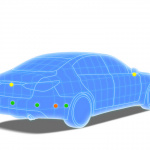
一方、発表された新技術は、CLAS信号で走行時のクルマの位置を取得しながら、過去に走行したルートをローカルマップとしてセンチメータ級の細かい制度で正確に記録。そのデータに沿って自動走行の正確な制御を行うことで、一般道など3D高精度マップがない道でも安全な自律走行を可能にするものです。
また、屋内・野外を問わず無人による駐車も実現します。同社では、実験車両「xAUTO」を製作し、実用化に向けた実証実験を進めています。

ほかにも、海外ではクルマに搭載したセンサー類からの周辺情報を、超高速でデータ処理するAI(人口知能)が判断して自動運転を制御するといった技術なども開発されています。
●新型コロナウイルスの影響はいかに?
クルマの自動運転に関わる技術開発の競争は、年々激化する傾向にあります。クルマの市場は世界的に巨大なため、自動運転やEVなどの電動化といった最新テクノロジーの波をビジネスチャンスと捉え、自動車メーカーだけでなく、巨大なIT企業やベンチャー企業なども新規参入しているためです。

「新技術を制するものが世界を制する」、現在まさに自動車産業は戦国時代の様相を呈していますが、その競争の先に、我々ユーザーの利便性がさらに向上する未来を期待したいものです。
特に、操作ミスなどで事故が増えている高齢者や障がい者などの日常の足として自動運転車を活用することは、近年の社会問題を解決する方策のひとつだといえるでしょう。
現在、新型コロナウイルスの影響で世界経済は悪化の一途をたどっています。我々に恩恵をもたらすかもしれないこれら新技術の開発が、そのために遅れたり、ストップしないことを切に望みます。
(文:平塚直樹/写真:トヨタ自動車、日産自動車、ビー・エム・ダブリュー、三菱電機、平塚直樹)


