

目次
■車両姿勢を安定させる車体制御用とカーナビで進路方向を検出する2つの用途に使用
●センサー本体の回転量を電気信号に変換することで角速度を計測
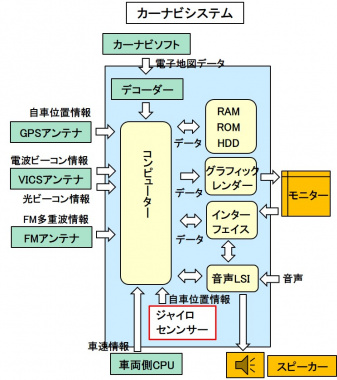
ジャイロセンサーは、車両の複雑な回転挙動ヨーイングやピッチング、ローリングなどを検出して、車両姿勢の制御に使われます。またカーナビでは、クルマの進路方向の変化を検出して、自車位置特定の補完に使用されます。
回転角を計測するジャイロセンサーの計測原理と適用例について、解説していきます。
●車両制御用のジャイロセンサー
回転角速度(角度/s)を計測するジャイロセンサーは、車両制御用とカーナビ用の2つの用途に使われています。
車両制御用のジャイロセンサーは、車両が急ハンドルやスリップなどで不安定になった場合にクルマの挙動を検知して、姿勢を安定させるように制動力を制御します。
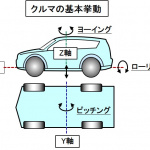
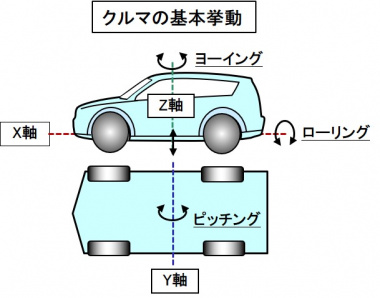
クルマの代表的な回転挙動には、「ヨーイング(左右方向)」と「ピッチング(前後方向)」、「ローリング(上下方向)」がありますが、ジャイロセンサーは主としてヨーイングの検出に使われます。
例えば、ESC(横滑り防止装置)では、ステアリングホイールの切れ角とヨーの値を比較して、クルマの挙動を判定します。ステアリングホイールの切れ角に対して、クルマに大きなヨーレートが発生している場合は、横滑りが発生したと判断します。
車両を安定させるために、ESCコントローラーが4輪それぞれ個別に制動力をかけて車両の姿勢を安定させます。
●カーナビ用のジャイロセンサー
カーナビの自車位置の確認のためには、「GPS(全地球測位システム)」は欠かせません。GPSは、軍事用目的の測位精度は20cm未満ですが、民生用途の精度は約10mです。
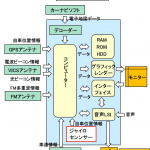
またトンネルやビル群などの障害物によって、GPS電波が途絶えた瞬間位置情報が消えてしまいます。そこでカーナビでは、GPSと「自立航法」を組み合わせて常に測位を行います。
自立航法とは、車速センサーで移動距離を、ジャイロセンサーで進路方向を求めて自車位置を決める手法です。
例えば、トンネル内に分岐点がある場合でも、ジャイロセンサーを用いてどちらに進んだか把握できます。
●ジャイロセンサーの回転角検出原理
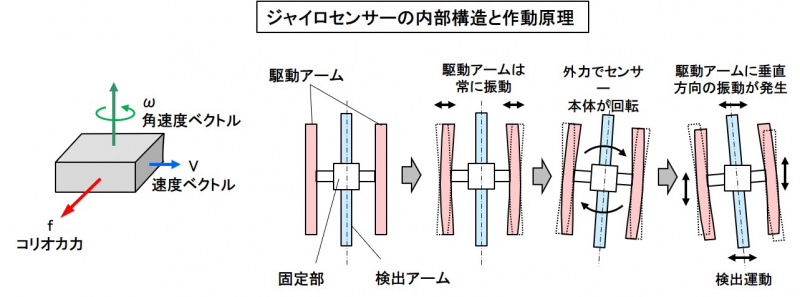
ジャイロセンサーは、センサー本体の回転量を電気信号に変換することで角速度を計測します。車載用としては、センサー内部の振動を利用するジャイロセンサーが使われます。
センサーに外から回転力が加わると、センサー内の振動する部位には垂直方向に「コリオリの力」が発生します。コリオリの力は、センサー内に新たな振動を発生させ、この振動から角速度を求めることができます。
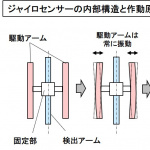
水晶を素子としたダブルT型構造の検出例を以下に示します。センサー本体は、駆動アーム、固定部、検出アームで構成されます。
・通常時は、駆動アームの横に電界を連続的に発生させることで、駆動アームを一定方向に振動させます。
・ジャイロセンサー本体に回転力が働き、回転します。
・振動する駆動アームが回転することで、駆動アームにコリオリの力が働き、垂直方向の振動が発生します。
・駆動アームが垂直方向に振動することで、検出アームが左右に振動します。この振動を磁界センサーで検出して、電気信号に変換します。
ジャイロセンサーを有効に活用すれば、クルマの挙動を検出して高いレベルの乗り心地を実現できます。また、道路や運転状況に応じた車両制御によって乗り心地を自由に設定できるので、好みの乗り心地を自動または手動スイッチで選択することも可能です。
(Mr.ソラン)


