
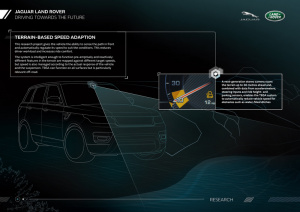
2台のレンジローバー・スポーツは、「無線車両間(V2V:vehicle-to-vehicle)通信システム」を活用し、車両位置、空転などの情報に加えて、すでに実用化されている「オールテレイン・プログレス・コントロール・システム(ATPC)」と「テレイン・レスポンス」の設定を2台で瞬時に共有するそうです。

数百万ポンド(約数億円)規模の予算を投じた「AUTONOMOUS ALL-TERRAIN DRIVING(オールテレイン自律運転)」研究プロジェクトは、あらゆるオンロードやオフロード環境、どんな天候条件においても車両が自動的に走行可能となることを目指しているプロジェクトで、ランドローバーを抱える同社らしい試み。
ジャガー・ランドローバー社では、高度な自律運転技術や完全自動運転技術の適用を舗装路のみに限定するのではなく、オフロードなどの脇道に入ったとしても、継続的にサポートしていきたいと考えているそうです。
日本の道路環境だとあまり必要性を感じさせませんが、世界には多様な「道」がありますし、ドライバーをサポートするという意味では悪路や悪天候下でこそ大切な技術ともいえそう。
目指しているのはオフロードなどの悪路だけでなく、コーンや一方通行表示のある工事中の道路をはじめ、雪で覆われた山道、ぬかるんだ林道でも、ドライバーと自律運転車両の両方がこの先進技術を使用できるようになると想定。
もし、ドライバーが前方の障害物や危険にどのように対処すればよいかわからない場合でも、車両に制御させることが可能になるそうです。
オールテレイン自律運転能力を実現するため、同社では未来の自律運転車両の「目」として機能する次世代のセンシング技術を開発。
ドライバーよりも優れた視覚を有するセンサーは常時作動し、どのような路面でも車両が車両自身で考え、最適なルート選択をする高度な人工知能を車両にもたせることができるようになるとのことです。
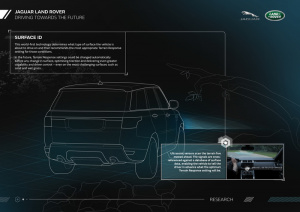
自律走行などの技術は、軍事を含むロボットなどで採用されていますが、同社が開発している「SURFACE IDENTIFICATION AND 3D PATH SENSING(路面識別および3D道路センシング)」研究では、カメラ、超音波、レーダーおよびLIDAR(ライダー)センサーを組み合わせ、車両に360度の視界を提供。非常に高精度なセンサーを搭載し、雨天時や降雪時でも路面特性からタイヤ幅まで判断し、ルート設定をすることができます。






(塚田勝弘)


