自動運転なのに急ハンドルも曲がりくねった道も自在な制御技術を開発! 一般道の自動運転実現へ一歩前進【日立オートモティブシステムズ】 | HITACHI_AUTONOMOUS_DRIVING_4 | 3枚目の写真(全8枚)
 スラロームも同様です。前走車が車線中央をキープしているのに対して、自車は大きく膨らんでしまっています。
スラロームも同様です。前走車が車線中央をキープしているのに対して、自車は大きく膨らんでしまっています。
 ステアリングの切り遅れ、戻し遅れが発生。大回りしたりショートカットしたりで、コースに沿って置かれたマーカーを豪快に踏んづけてしまっていました。
ステアリングの切り遅れ、戻し遅れが発生。大回りしたりショートカットしたりで、コースに沿って置かれたマーカーを豪快に踏んづけてしまっていました。

 日立オートモティブシステムズの十勝テストコースで高精度な追従走行を可能にする技術のデモが行われました。
日立オートモティブシステムズの十勝テストコースで高精度な追従走行を可能にする技術のデモが行われました。
 制御を入れると、きれいに前走車の動きをトレースしながら、スラロームをスムーズにクリアすることができました。
制御を入れると、きれいに前走車の動きをトレースしながら、スラロームをスムーズにクリアすることができました。
 制御ありでは、マーカーを踏みつけることなくクランクをクリア。制御なしの写真と比べると、ラインどりがまったく違うことがわかると思います。クルマの動きも滑らかで、乗員も安心して乗っていられます。
制御ありでは、マーカーを踏みつけることなくクランクをクリア。制御なしの写真と比べると、ラインどりがまったく違うことがわかると思います。クルマの動きも滑らかで、乗員も安心して乗っていられます。
 先行車がインプレッサ、デモ車がアクセラ。インプレッサにはGPSが搭載されており、その位置情報と車速を基にアクセラが追従走行を行います。
先行車がインプレッサ、デモ車がアクセラ。インプレッサにはGPSが搭載されており、その位置情報と車速を基にアクセラが追従走行を行います。
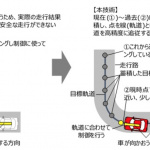
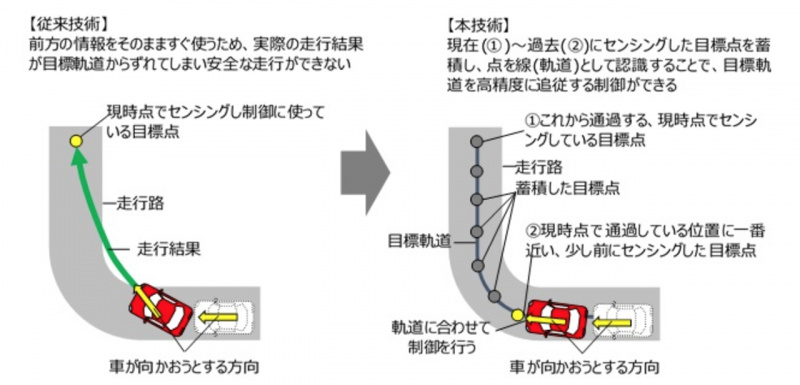 センシングした目標点はすぐに使うのではなくいったん蓄積し、自車が近づいてから活用することで高精度な追従走行が可能となります。
センシングした目標点はすぐに使うのではなくいったん蓄積し、自車が近づいてから活用することで高精度な追従走行が可能となります。